


私たちはあなたのプライバシーを大切にします
「すべてのクッキーを許可」をクリックすると、サイトのナビゲーションを向上させ、サイト使用状況を分析し、マーケティングおよびパフォーマンスの取り組みを支援するために、クッキーをデバイスに保存することに同意したことになります。この件に関する詳細情報は、ポリシーをご覧ください。プライバシーポリシー

Winstar社は引き続き包括的なソリューションサービスをお客様に提供して、それに応じてスマートディスプレイシリーズ製品を積極的に発売しました。 出発点としてCANシリーズのスマートディスプレイを発売し始めます。CANインターフェイスとは何でしょうか。 どのように機能するでしょうか。ユーザーにどのような利点をもたらすことができるでしょうか。以下の詳細内容を読んでみましょう。
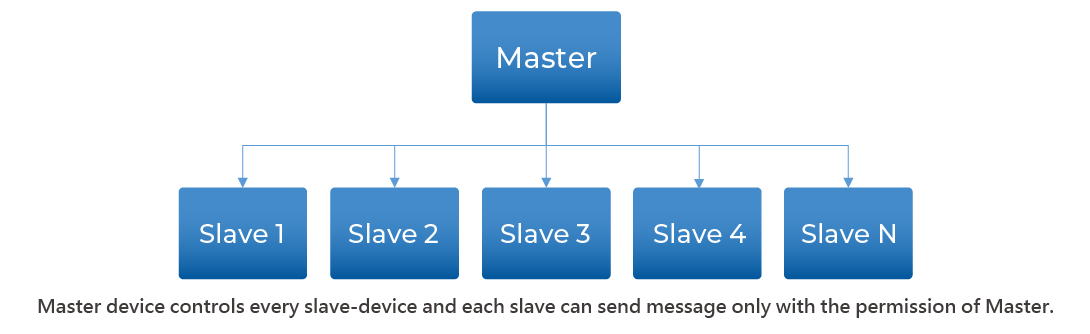
CAN(Controller Area Network)は機能が豊富な自動車用バス規格です。RS485インターフェイスとは異なって、ネットワーク上のECU(電子制御ユニット)がホストを必要とせずに相互に通信できるように設計されて、基本的にコントロールエンドとしてホスト(マスター)が必要にします。但しCANはホスト制御なくでも、より優れた柔軟な通信アプリケーションを提供します。
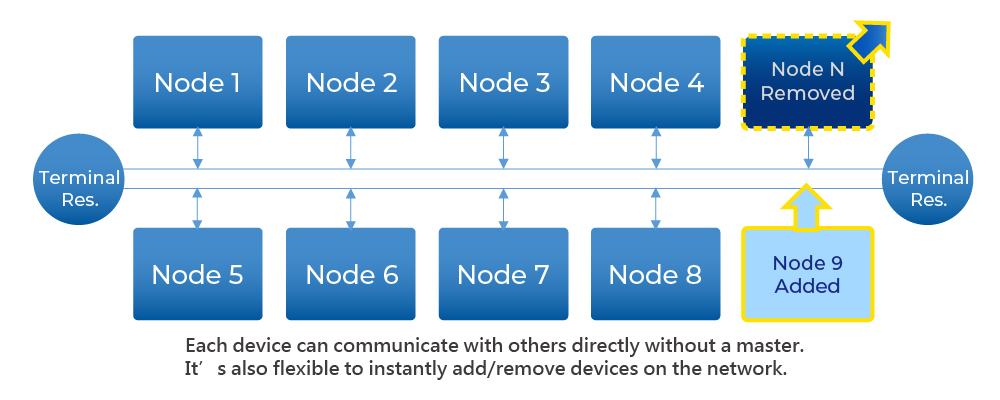
CANはメッセージ指向プロトコルに基づく放送通信メカニズムです。 情報に応じて、特定のステーションアドレス(ノードID)を割り当てるのではなく、メッセージ識別子(各識別子はネットワーク全体で一意)を使用して、配信するメッセージの優先順位を定義します。したがって、CANに優れた柔軟な調整機能があって、ソフトウェアやハードウェアを調整せずに既存のネットワークにノードを追加できます。 さらに、メッセージの送信は特別なタイプのノードに基づいていなくて、ネットワークをアップグレードする際の利便性が向上します。
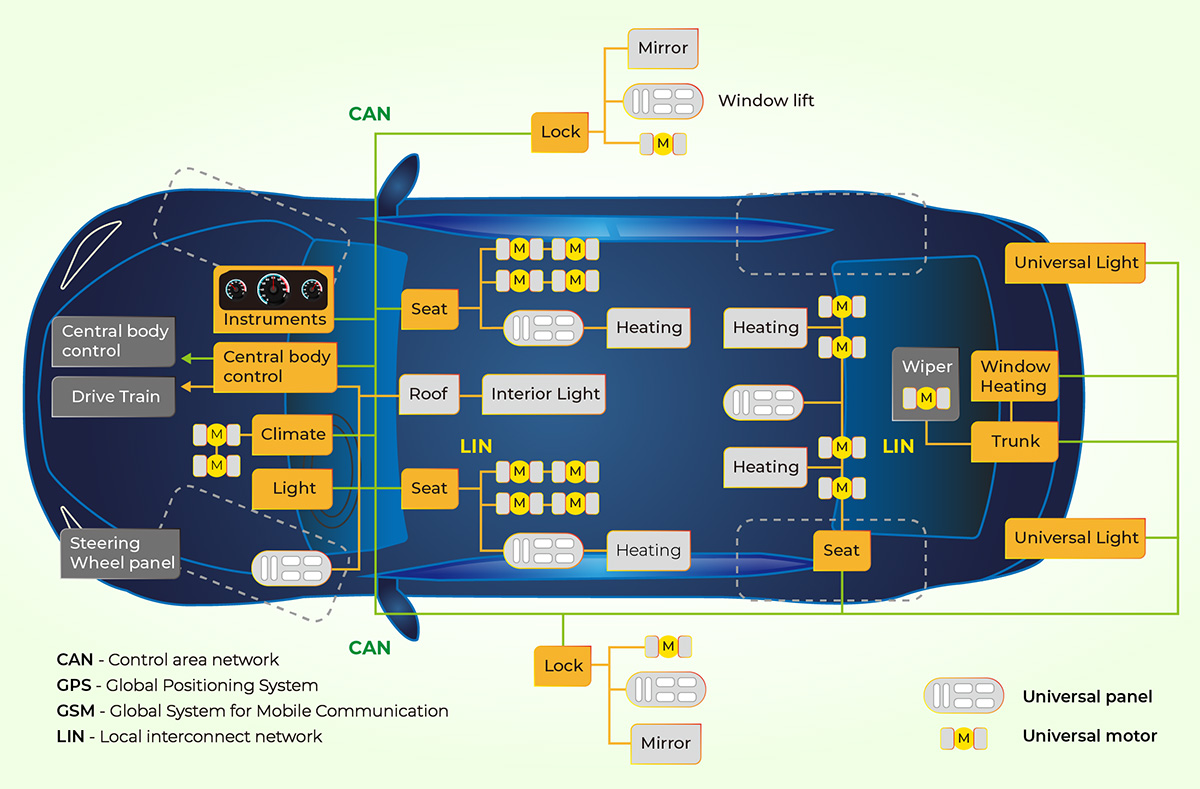
CANバスのアプリケーションは、データ通信の信頼性とリアルタイムの要求を完全に満たすことができます。 これがCANバスアプリケーションが産業医療やその他のアプリケーションに費やされた理由です。
BOSCH社は1983年にCANバスを開発して、1986年に米国ミシガン州デトロイトで開催されたInternational Society of Automotive Engineers(SAE)の会議で正式に発表されました。最初のCANコントローラーはIntelとPhilipsによって製造されて1987年にリリースされました。CANベースのマルチラインシステムを搭載した世界初の車両は、1991年に発売されたメルセデスベンツW140でした。
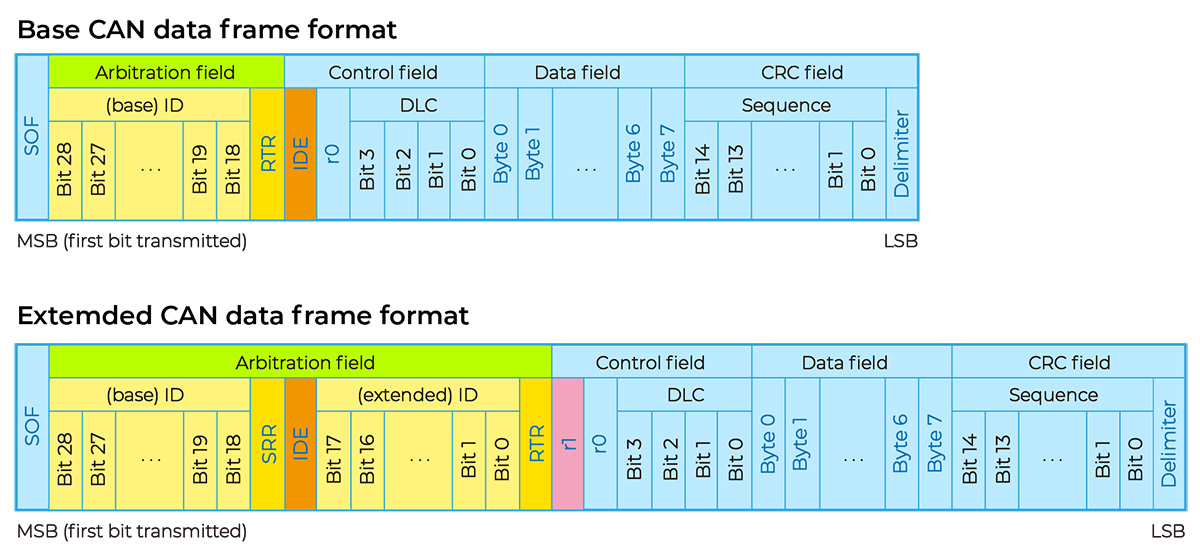
BOSCH社はCAN仕様のいくつかのバージョンを公開しています。CAN2.0は1991年にリリースされて二つの仕様はあります。パートA(CAN 2.0A)は11ビットの識別コードを使用する標準フォーマットに適用されるもので、パートB(CAN 2.0B)は29ビットの識別子を使用する拡張フォーマットに適用されるものです。
また、1993年に国際標準化機構(ISO)はCAN標準ISO11898を公開しました。その後CAN標準は2つの部分に再コンパイルされました。ISO11898-1はデータリンク層をカバーして、ISO11898-2は高速CANバスの物理層をカバーしています。ISO11898-3は後で発表されて低速CANバスの物理層とCANバスのフォールトトレランス仕様をカバーしています。物理層標準ISO11898-2及びISO11898-3はBOSCH CAN2.0仕様に含まれません。これらはISOとは別に購入できます。
2012年にBOSCH社はCAN_FD 1.0、つまり可変データレートCANを発表しました。この仕様は異なるアーキテクチャを使用して、アービトレーション後、より高速なビットレートに切り替えて、異なるデータ長を送信できます。CAN FDは既存のCAN2.0ネットワークと互換性があるため、新しいCANFDデバイスは同じ制御ネットワーク上の既存のCANデバイスと共存できます。
1996年以降、米国で販売されるすべての自動車と小型トラックはOBD-II標準(オンボード診断)に準拠する必要がありました。欧州連合では、2001年以降に販売されたガソリン車と2004年以降に販売されたディーゼル車は、EOBD基準(European On Board Diagnostics)に準拠することが義務付けられています。2008年に米国で販売されるすべての車両は信号プロトコルの1つとしてCANを実装する必要があります。
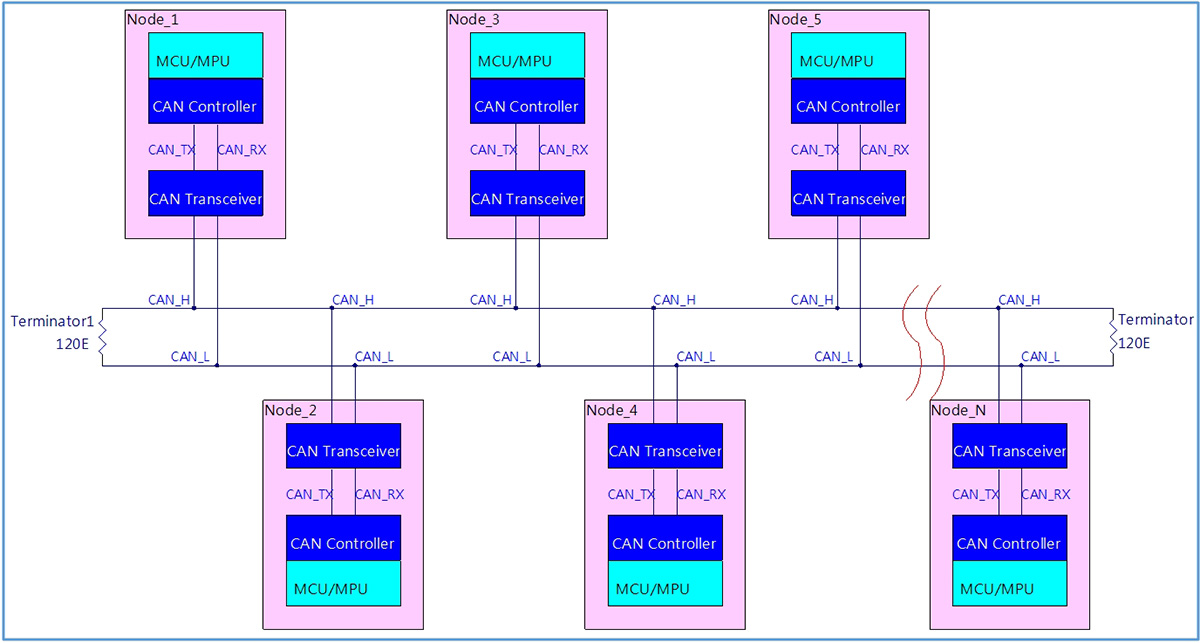
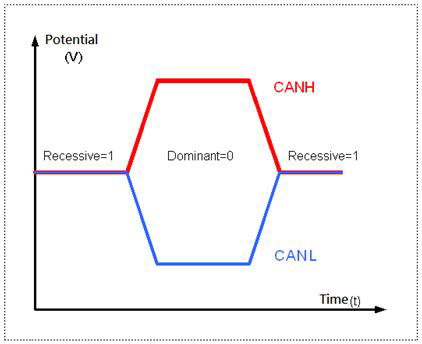
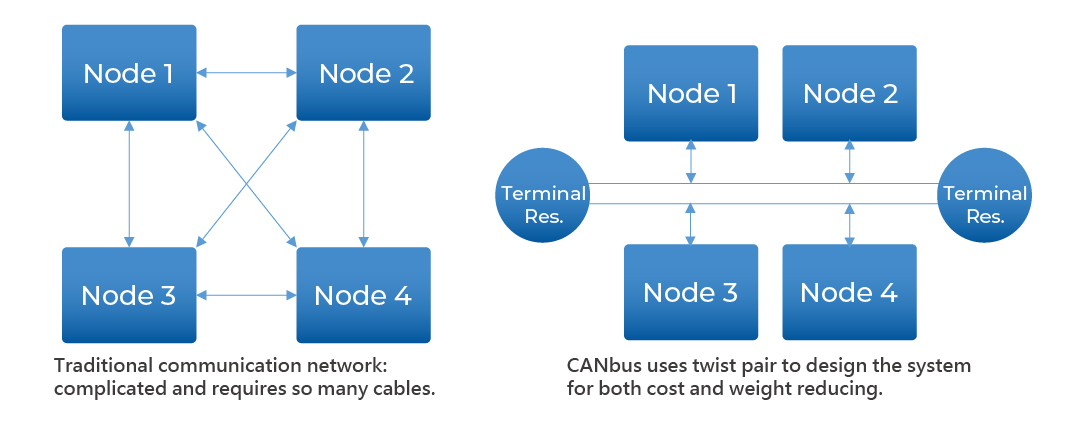
すべてのノードは2本のワイヤーで接続されています。 2本のワイヤはツイストペアを形成して、120Ωの特性インピーダンスで接続されます。CANバスがドミナント(0)信号を送信すると、CAN_H端子がハイレベルに持ち上げられて、CAN_Lがローレベルに引き下げられます。リセッシブ(1)信号が送信されると、CAN_HまたはCAN_L端子は駆動されません。 主信号CAN_H及びCAN_Lの公称差動電圧は2Vです。
各ノードは情報を送受信できますが、同時に受信することはできません。メッセージまたはフレームには、主に情報の優先度を示す識別コード(ID)が最大8データバイト含まれます。 CRC、ACK及びその他のフレーム部分もメッセージの一部です。
1つのノードがドミナント(0)ビットを送信して、別のノードがリセッシブ(1)ビットを送信する場合、バス上で競合が発生して、最終的な結果としてドミナントビットが「勝ち」ます。これは優先度の高い情報に遅延がないことを意味します。優先度の低いノード情報はドミナントビットの最後で自動的に送信されて、6クロックビット後に再送信が試行されます。これにより、CANはインスタント優先通信システムとして適しています。
ロジック0または1の正確な電圧は、使用する物理層によって異なりますが、CANの基本原理では、送信ノード自体を含めて、各ノードがCANネットワーク上のデータを監視する必要です。 すべてのノードが同時にロジック1を送信している場合、送信ノードと受信ノードを含むすべてのノードにこのロジック1信号が表示されます。すべての送信ノードが同時にロジック0信号を送信する場合、すべてのノードにこのロジック0信号が表示されます。1つ以上の送信ノードが論理0信号を送信するが、1つ以上の送信ノードが論理1信号を送信する場合、論理1信号を送信するノードを含むすべてのノードも論理0信号を認識します。ノードがロジック1信号を送信したが、ロジック0信号を確認すると、回線に紛争があることに気づいて、ログアウトします。このプロセスを通じて、ロジック1を送信するノードは他のノードがロジック0を送信すると、ログアウトするか、アービトレーションを失います。 アービトレーションを失ったノードは、後で情報をキューに再追加して、CANフレームのビットストリームは送信ノードが1つだけになるまで失敗することなく続行されて、これは最初のロジック1を送信するノードがアービトレーションを失うことを意味します。CANフレームの開始時にすべてのノードが11ビット(またはCAN 2.0Bでは29ビット)の識別コードを送信するため、識別コードが最も小さい送信ノードの先頭には0が多くなります。そのノードがアービトレーションに勝ち、最高の優先順位を持ちます。


追記:この技術文書の原文は英語で、和訳の内容に疑問がある場合は、原文をご参考願います。

「すべてのクッキーを許可」をクリックすると、サイトのナビゲーションを向上させ、サイト使用状況を分析し、マーケティングおよびパフォーマンスの取り組みを支援するために、クッキーをデバイスに保存することに同意したことになります。この件に関する詳細情報は、ポリシーをご覧ください。プライバシーポリシー