Wstęp
Firma Winstar stale zapewnia klientom kompleksowe usługi w zakresie rozwiązań i aktywnie wprowadza na rynek nasze produkty z serii wyświetlaczy typu Smart. Pierwszy wprowadzony na rynek wyświetlacz typu Smart z serii CAN opiera się na tym, jako na punkcie wyjścia. Czym jest magistrala CAN? Jak to działa? Jakie korzyści może przynieść użytkownikom? Przeczytajmy poniżej więcej informacji.
Wprowadzenie
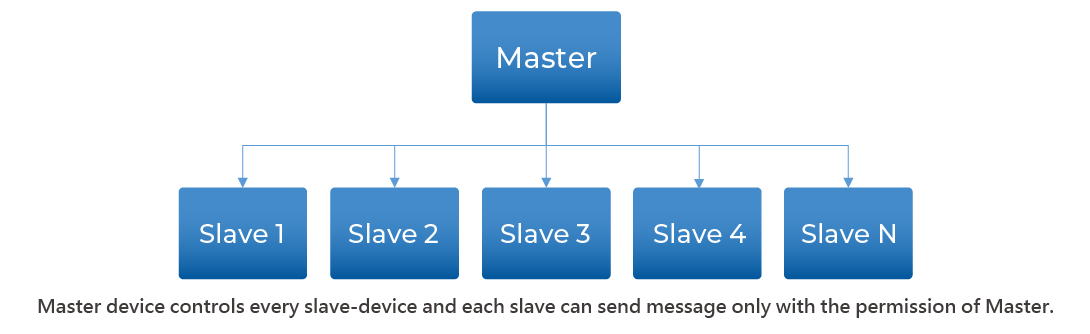
CAN (Controller Area Network) to bogaty w funkcje standard magistrali samochodowej. Został zaprojektowany, aby umożliwić ECU (Electronic Control Unit) w sieci, komunikowanie się ze sobą bez potrzeby posiadania hosta, w przeciwieństwie do interfejsu RS485, który w zasadzie musi mieć hosta (Master) jako elementy kończącego sterowanie; ale CAN zapewnia lepsze i elastyczne aplikacje komunikacyjne, które nie wymagają kontroli hosta.
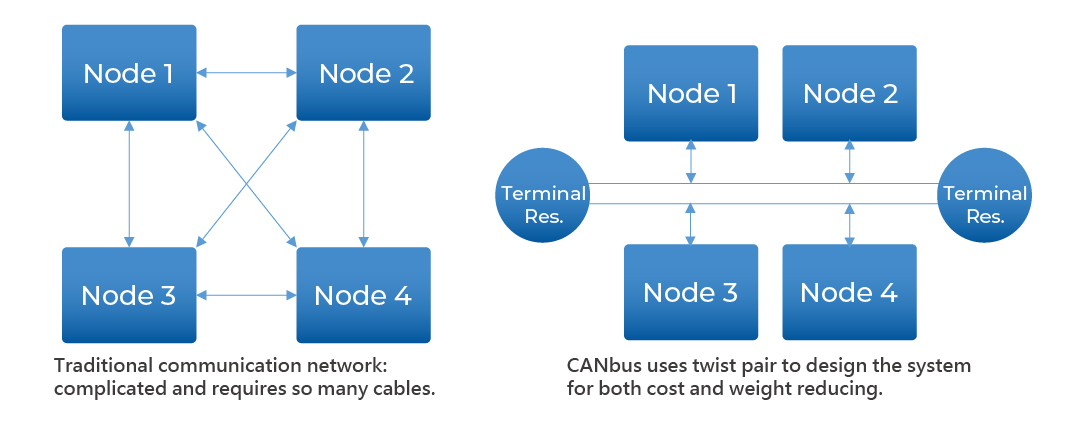
Topologia systemu RS485
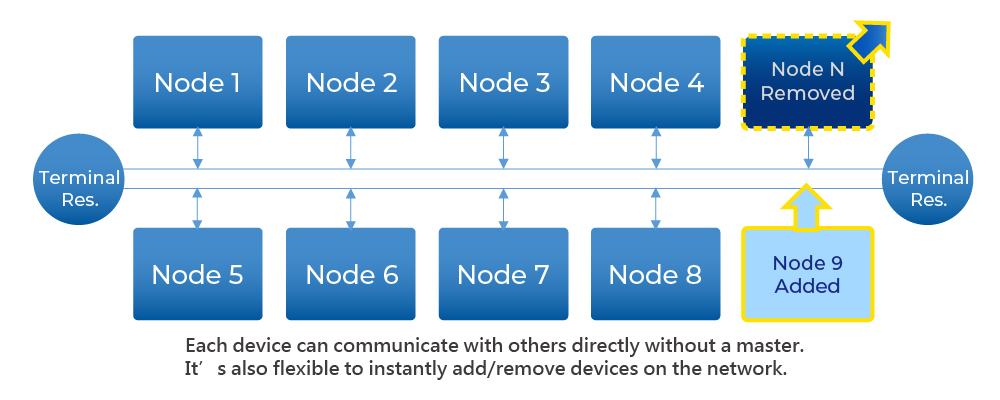
Topologia systemu magistrali CAN
CAN to mechanizm komunikacji rozgłoszeniowej, oparty na protokole zorientowanym na komunikaty. Zgodnie z treścią informacji, wykorzystuje on Identyfikator wiadomości (każdy identyfikator jest unikalny w całej sieci) do określenia kolejności priorytetów dostarczania wiadomości, zamiast przydzielania konkretnego adresu stacji (ID węzła).
Dlatego CAN ma dobre możliwości elastycznego dostosowywania i może dodawać węzły do istniejącej sieci, bez wprowadzania zmian w oprogramowaniu i sprzęcie. Ponadto, transmisja komunikatów nie jest oparta na specjalnych typach węzłów, co zwiększa wygodę rozbudowy sieci.
Zastosowania magistrali CAN mogą całkowicie zaspokoić wymagania dotyczące niezawodności i transmisji danych w czasie rzeczywistym. To jest powód, dla którego zastosowanie magistrali CAN rozszerzyło się do zastosowań przemysłowych, medycznych i innych.
Topology figure (Sub-Block):
Historia
Firma BOSCH opracowała magistralę CAN w 1983 roku. Sieć CAN została oficjalnie ogłoszona na spotkaniu International Society of Automotive Engineers (SAE), które odbyło się w Detroit w stanie Michigan w USA w 1986 roku. Pierwszy kontroler CAN został wyprodukowany przez firmy Intel i Philips i wydany w 1987 roku. Pierwszym na świecie samochodem wyposażonym w oparty na CAN system wieloliniowy, był Mercedes-Benz W140 wprowadzony na rynek w 1991 roku.
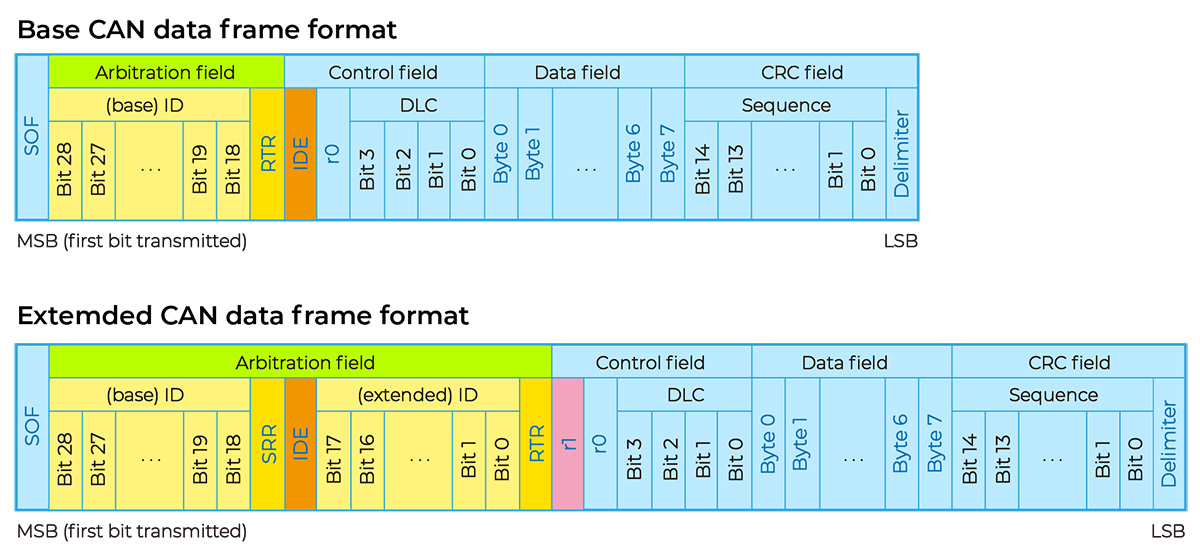
Firma BOSCH opublikowała kilka wersji specyfikacji CAN. CAN 2.0 został wydany w 1991 roku. Specyfikacja podzielona jest na dwie części; Część A (CAN 2.0A) dotyczy formatu standardowego wykorzystującego 11-bitowe kody identyfikacyjne, a część B (CAN 2.0B) dotyczy formatu rozszerzonego wykorzystującego 29-bitowe identyfikatory.
W 1993 roku Międzynarodowa Organizacja Normalizacyjna (ISO) opublikowała normę CAN ISO11898. Później, standard CAN został ponownie skompilowany na dwie części: ISO11898-1 obejmował warstwę łącza danych; ISO11898-2 obejmował warstwę fizyczną szybkiej magistrali CAN; standard ISO11898-3 został ogłoszony później i obejmował warstwę fizyczną magistrali CAN o niskiej szybkości oraz specyfikację tolerancji na uszkodzenia magistrali CAN. Standardy warstwy fizycznej ISO11898-2 i ISO11898-3 nie są uwzględnione w specyfikacji BOSCH CAN2.0. Można je kupować oddzielnie od ISO.
W 2012 roku BOSCH ogłosił CAN_FD 1.0, czyli CAN o zmiennej szybkości transmisji danych. Ta specyfikacja wykorzystuje inną architekturę, pozwalającą po arbitrażu przełączyć się na większą przepływność i przesyłać różne długości danych. CAN FD jest kompatybilny z istniejącą siecią CAN 2.0, więc nowe urządzenie CAN FD może współistnieć z istniejącym urządzeniem CAN w tej samej sieci sterowania.
Po 1996 roku wszystkie samochody i lekkie ciężarówki sprzedawane w Stanach Zjednoczonych musiały spełniać normy OBD-II (On Board Diagnostics). W Unii Europejskiej pojazdy z silnikiem benzynowym sprzedawane po 2001 r. i pojazdy z silnikiem Diesla sprzedawane po 2004 r., muszą spełniać normy EOBD (European On Board Diagnostics). W 2008 roku wszystkie pojazdy sprzedawane w USA są zobowiązane do zaimplementowania CAN jako jednego z protokołów sygnalizacyjnych.
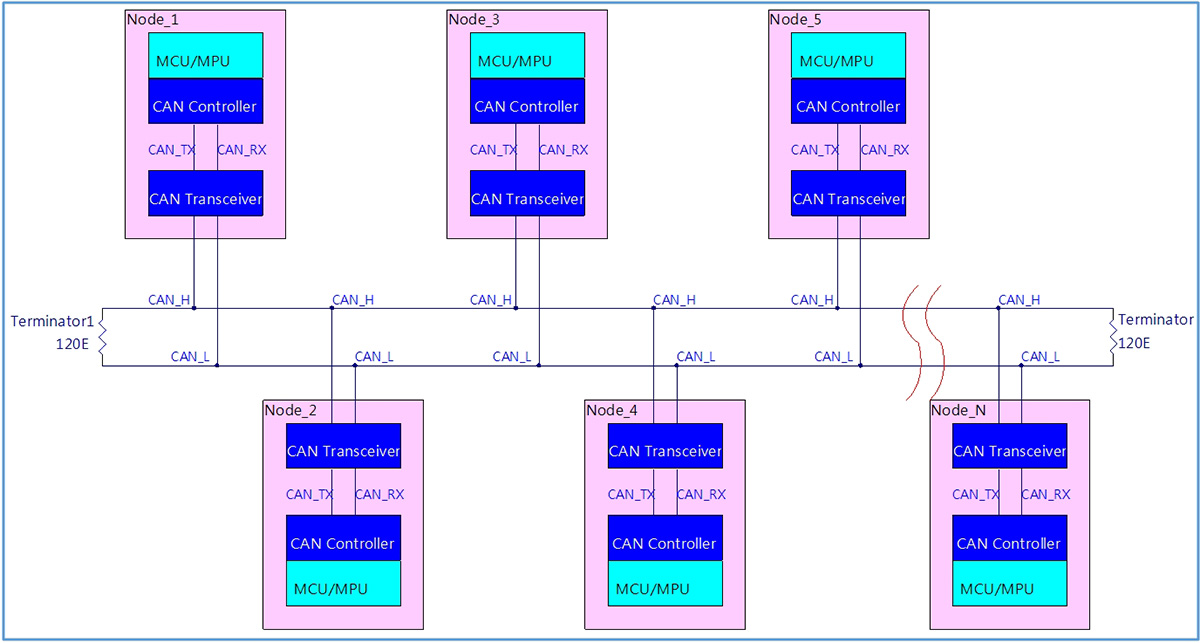
Funkcje sprzętowe:
Wszystkie węzły są połączone ze sobą dwoma przewodami. Dwa przewody tworzą skręconą parę i są połączone z impedancją charakterystyczną 120 Ω.
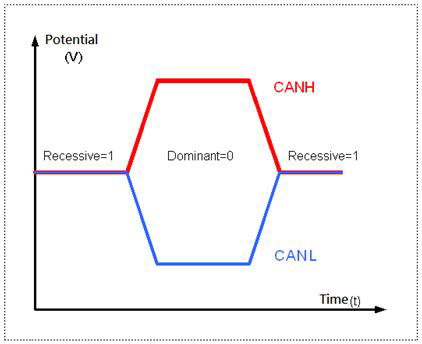
Gdy magistrala CAN przesyła sygnał dominujący (0), podniesie zacisk CAN_H do wysokiego poziomu i obniży poziom CAN_L. Gdy przesyłany jest sygnał recesywny (1), zacisk CAN_H lub CAN_L nie będzie sterowany. Dominujący sygnał CAN_H i CAN_L mają nominalne napięcie różnicowe 2V.
Wygląd sygnału warstwy fizycznej:
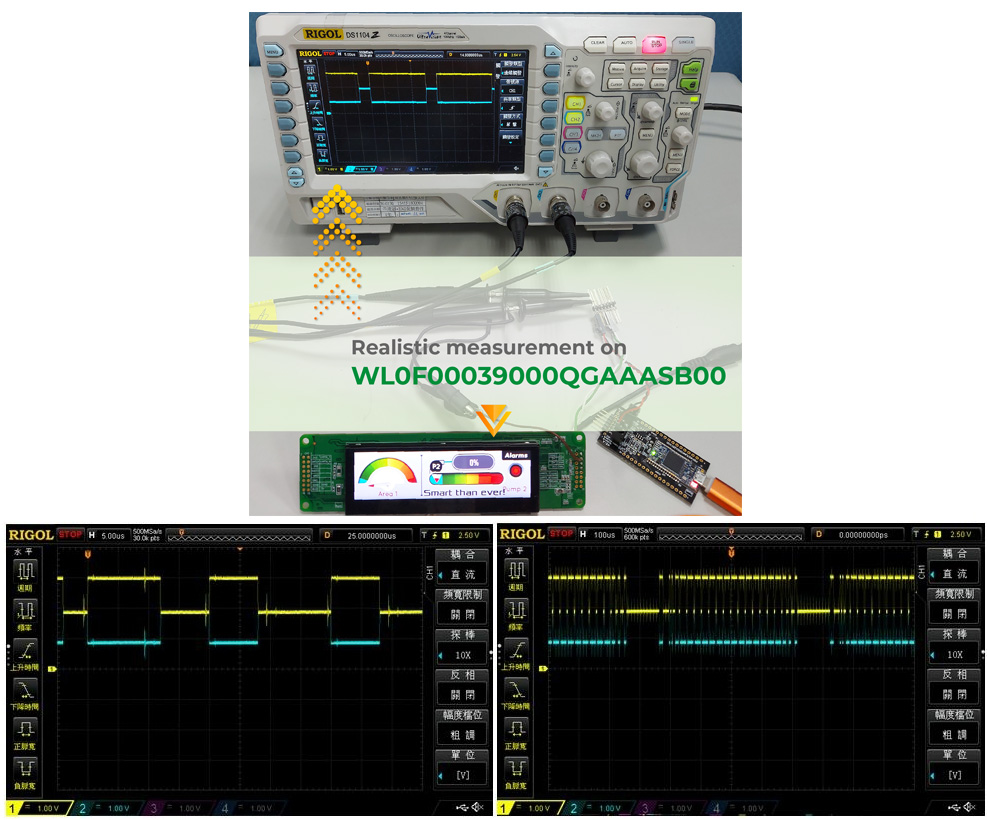
Realistyczny pomiar na WL0F00039000QGAAASB00 CAN_H/CAN_L:
Funkcje firmware:
Każdy węzeł może wysyłać i odbierać informacje, ale nie w tym samym czasie. Wiadomość lub ramka zawiera głównie kod identyfikacyjny (ID), który wskazuje priorytet informacji, do ośmiu bajtów danych. CRC, ACK i inne części ramki są również częścią wiadomości.
Jeśli jeden węzeł transmituje bit dominujący (0), a inny bit recesywny (1), to na szynie występuje konflikt, a końcowym rezultatem jest „wygrana” dominującego bitu. Oznacza to, że nie ma opóźnień w informacjach o wyższym priorytecie. Informacja o węźle o niższym priorytecie jest automatycznie przesyłana na końcu bitu dominującego, a po 6 bitach zegara podejmowana jest próba retransmisji. To sprawia, że CAN nadaje się jako system komunikacji o natychmiastowym priorytecie.
Dokładne napięcie logiki 0 lub 1 zależy od używanej warstwy fizycznej, ale podstawowa zasada CAN wymaga, aby każdy węzeł monitorował dane w sieci CAN, w tym sam węzeł wysyłający. Jeśli wszystkie węzły transmitują sygnał logiczny 1 w tym samym czasie, wszystkie węzły zobaczą ten sygnał logiczny 1, w tym węzeł wysyłający i węzeł odbierający. Jeśli wszystkie węzły wysyłające przesyłają sygnał logicznego 0 w tym samym czasie, wszystkie węzły zobaczą ten sygnał logiczny 0. Gdy jeden lub więcej węzłów nadawczych transmituje sygnał logiczny 0, ale jeden lub więcej węzłów nadawczych transmituje sygnał logiczny 1, wszystkie węzły, w tym węzeł, który transmituje sygnał logiczny 1, również zobaczą sygnał logiczny 0. Kiedy węzeł przesyła sygnał logiczny 1, ale widzi sygnał logiczny 0, zorientuje się, że na linii jest konflikt i wyloguje się. Dzięki temu procesowi każdy węzeł, który przesyła logikę 1, wylogowuje się lub traci arbitraż, gdy inne węzły przesyłają sygnał logiczny 0. Węzeł, który przegra arbitraż, później ponownie doda informacje do kolejki, a strumień bitów ramki CAN będzie kontynuowany bez awarii, dopóki nie zostanie tylko jeden węzeł wysyłający. Oznacza to, że węzeł, który przesyła pierwszą sygnał logiczny 1, przegrywa arbitraż. Ponieważ wszystkie węzły przesyłają 11-bitowy (lub 29-bitowy w CAN 2.0B) kod identyfikacyjny podczas uruchamiania ramki CAN, węzeł wysyłający z najniższym kodem identyfikacyjnym ma na początku więcej zer. Ten węzeł wygrywa arbitraż i ma najwyższy priorytet.
Format danych CAN2.0A/B:
Dane o ruchu na magistrali CAN wyglądają następująco:
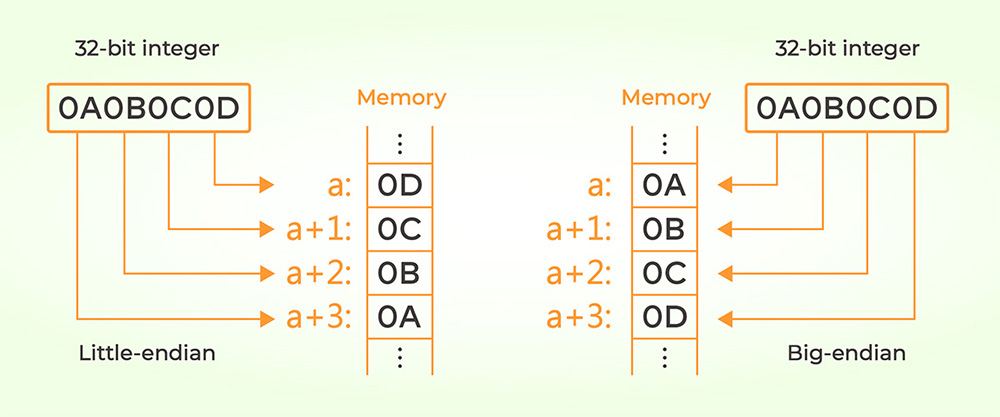
Sekwencje danych w ładunku:
Konkluzje:
5 korzyści, które uzyskaliśmy dzięki funkcjom magistrali CAN.
- Niski koszt: ECU (Electronic Control Units) komunikują się za pośrednictwem pojedynczego interfejsu CAN, magistrala CAN oferuje ograniczenie problemów, lekkość i niski koszt.
- Scentralizowany: System magistrali CAN pozwala na centralną diagnostykę błędów (np. OBD-II) i konfigurację we wszystkich ECU.
- Niezawodny: Warstwa fizyczna systemu jest odporna na awarie podsystemów i zgodna z EMC (kompatybilność elektromagnetyczna).
- Efektywny: Wiadomości CAN są ustalane priorytetowo i wykorzystują arbitraż bitowy za pośrednictwem identyfikatorów, dzięki czemu identyfikatory o najwyższym priorytecie nie są przerywane.
- Elastyczny: Każdy ECU zawiera chip do odbierania wszystkich przesyłanych komunikatów, decydowania o znaczeniu i odpowiedniego działania - pozwala to na łatwą modyfikację i włączanie dodatkowych węzłów
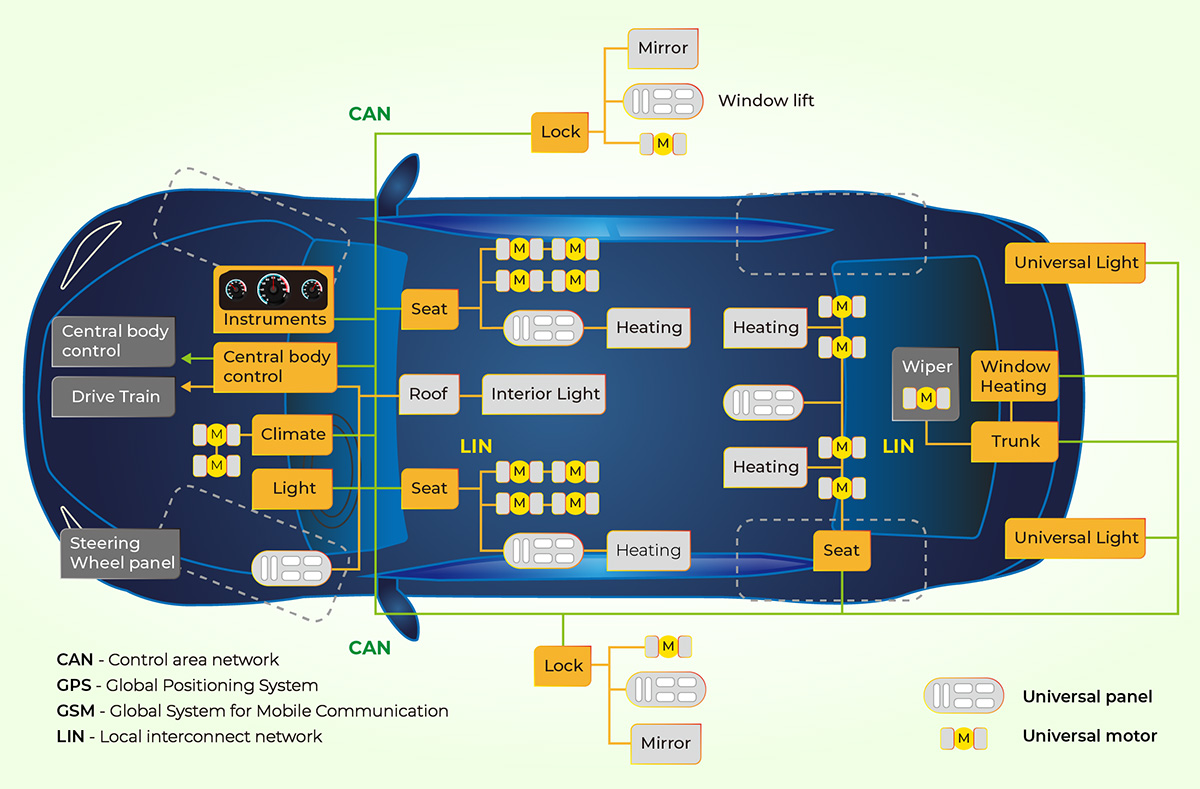
Niektóre przykłady zastosowań:
- Motoryzacja (instrumenty samochodowe, ABS, OBD-II itp.).
- Systemy transportowe (pojazdy szynowe, samoloty, statki morskie, itp.).
- Maszyny mobilne (układarki/wózki widłowe, budownictwo, rolnictwo, itp.).
- Systemy sterowania maszyn przemysłowych (automatyka przemysłowa, zarządzanie informacją, itp.).
- Automatyka domowa i budynkowa (HVAC, windy, itp.).
- Urządzenia medyczne i automatyka laboratoryjna.
Ograniczenia:
- CANopen, istnieje 11-bitowy identyfikator CAN z 4-bitowym kodem funkcji i 7-bitowym identyfikatorem węzła. Dlatego, unikalne adresy są dostępne dla maksymalnie 127 węzłów na magistrali.
- W J1939 istnieje 8-bitowy adres urządzenia, który odpowiada maksymalnie 255 identyfikatorom węzła. Adres 255 jest używany do rozgłaszania, a adres 254 jest zarezerwowany do zarządzania siecią. Dlatego, unikalne adresy są dostępne dla 253 węzłów na magistrali.
- Przepustowość komunikacji jest niska i o wysokiej szybkości w odniesieniu do odległości transmisji.