Vorwort
Winstar bietet Kunden unaufhörlich umfassende Dienstleistungen mit Lösungen und brachte daher aktiv unsere Produkte der Smart-Display-Serie auf den Markt. Das erstmalig vorgestellte Smart-Display der CAN-Serie basierte darauf als Startpunkt. Was ist ein CAN-Bus? Wie funktioniert er? Welche Vorteile kann er Nutzern bieten? Im Folgenden können Sie mehr darüber lesen.
Einführung
CAN (Controller Area Network) ist ein funktionsreicher Bus-Standard für Automobile. Es wurde so entwickelt, dass ECUs (elektronische Steuergeräte) ohne einen Host in einem Netzwerk miteinander kommunizieren können; im Gegensatz zur RS485-Schnittstelle, die grundsätzlich einen Host (Master) am Steuerende aufweisen muss. CAN bietet bessere und flexible Anwendungen zur Kommunikation, für die keine Hoststeuerung erforderlich ist.
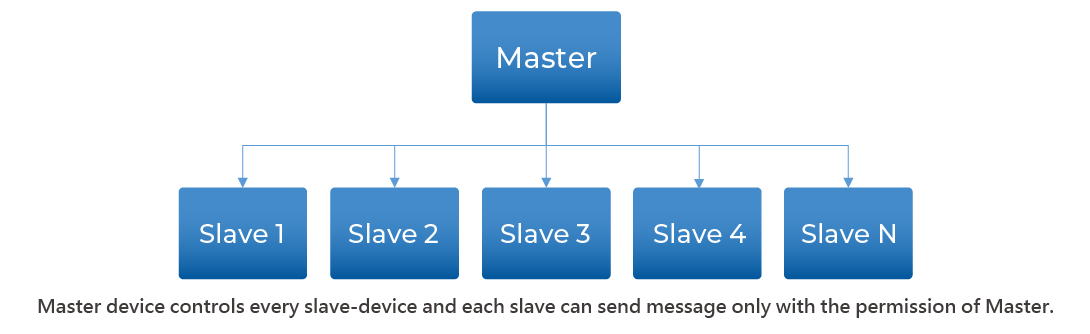
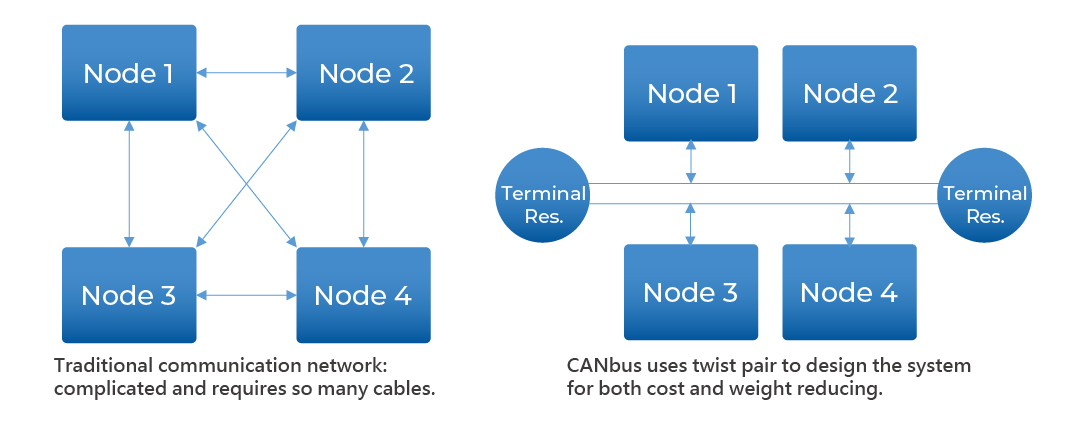
RS485-Systemtopologie
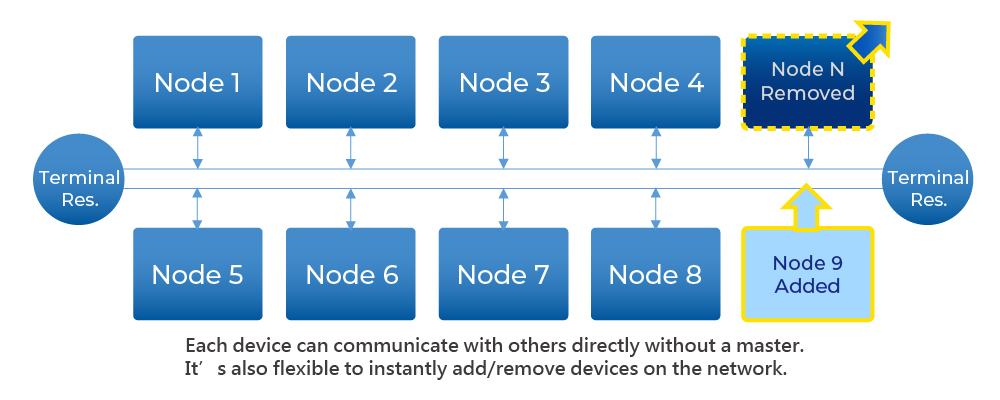
CAN-Bus-Systemtopologie
CAN ist ein Broadcast-Kommunikationsmechanismus, der auf ein auf Meldungen basiertes Protokoll ausgerichtet ist. Entsprechend dem Inhalt von Informationen nutzt es einen Meldungsidentifikator (jeder einzelne Identifikator kommt im gesamten Netzwerk nur einmal vor), um die Reihenfolge der abzuliefernden Meldungen der Priorität nach festzulegen, anstatt eine bestimmte Stationsadresse (Knoten-ID) zuzuweisen.
Infolgedessen besitzt CAN ein gutes, flexibles Anpassungsvermögen und kann dem vorhandenen Netzwerk ohne Anpassungen in der Software und Hardware Knoten hinzufügen. Zudem basiert die Übertragung von Meldungen nicht auf bestimmten Knotentypen, sodass sich das Netzwerk viel bequemer aufrüsten lässt.
Die CAN-Bus-Anwendungen können die Anforderungen an Zuverlässigkeit und Echtzeit bei der Datenkommunikation in vollem Umfang abdecken. Das ist der Grund, warum CAN-Bus-Anwendungen sich mittlerweile auf industrielle, medizinische und andersartige Anwendungen erstrecken.
Topology figure (Sub-Block):
Geschichte
BOSCH entwickelte den CAN-Bus im Jahre 1983. CAN wurde offiziell auf der internationalen Konferenz des Verbands der Automobilingenieure (SAE) vorgestellt, die 1986 in Detroit, Michigan, USA tagte. Das erste CAN-Steuergerät wurde von Intel und Philips produziert und 1987 für den Markt freigegeben. Das weltweit erste Auto, das mit einem CAN-basierten Vernetzungssystem ausgestattet wurde, war der Mercedes-Benz Baureihe W 140, der 1991 vorgestellt wurde.
BOSCH veröffentlichte mehrere Versionen von der CAN-Spezifikation. CAN 2.0 wurde im Jahr 1991 für den Markt freigegeben. Die Spezifikation besteht aus zwei Teilen: Teil A (CAN 2.0A) gilt für das Standardformat mit 11-Bit-Identifizierungscodes und Teil B (CAN 2.0B) gilt für das erweiterte Format mit 29-Bit-Identifikatoren.
Im Jahre 1993 veröffentlichte die internationale Organisation für Normung (ISO) den CAN-Standard ISO11898. Später wurde dieser CAN-Standard in zwei Teilen neu zusammengestellt: ISO11898-1 befasste sich mit der Datenlinkschicht; ISO11898-2 behandelte die Bitübertragungsschicht des High-Speed-CAN-Busses; ISO11898-3 wurde später vorgestellt und thematisierte die Bitübertragungsschicht des Low-Speed-CAN-Busses sowie die Fehlertoleranzspezifikation des CAN-Busses. Die Bitübertragungsschicht-Standards von ISO11898-2 und ISO11898-3 sind in der BOSCH CAN 2.0-Spezifikation nicht enthalten. Sie können separat von der ISO erworben werden.
Im Jahr 2012 stellte BOSCH CAN FD 1.0 oder CAN für variable Datenraten vor. Diese Spezifikation bedient sich einer anderen Architektur, die nach einer Entscheidung die Umschaltung in eine schnellere Bitrate und die Übertragung unterschiedlicher Datenlängen ermöglicht. CAN FD ist mit dem vorhandenen CAN 2.0-Netzwerk kompatibel, demzufolge das neue CAN FD-Gerät mit dem in demselben Netzwerk vorhandenen CAN-Gerät gleichzeitig bestehen kann.
Nach 1996 war es erforderlich, dass alle in den Vereinigten Staaten verkauften Autos und Kleinlaster die OBD-II-Standards erfüllten (On-Board-Diagnose). In der Europäischen Union wurde es verpflichtend, dass nach 2001 verkaufte Bezinfahrzeuge und nach 2004 verkaufte Dieselfahrzeuge die EOBD-Standards erfüllten (europäische On-Board-Diagnose). Im Jahr 2008 musste in allen in den USA verkauften Fahrzeugen CAN als eines seiner Signalisierungsprotokolle eingebaut sein.
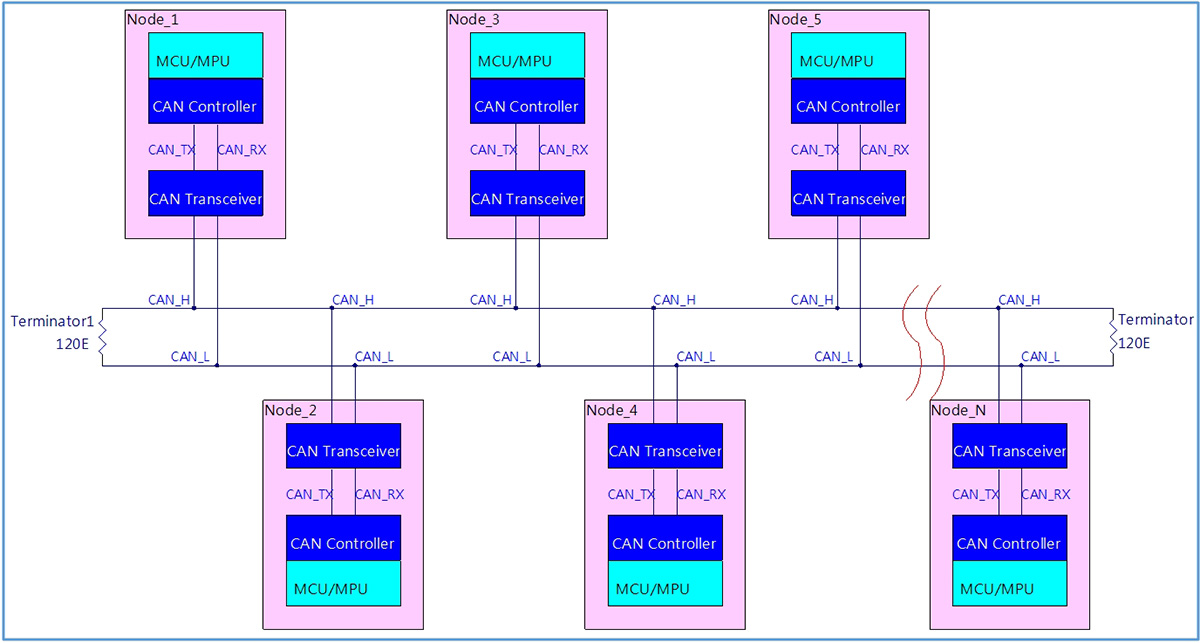
Hardwaremerkmale:
Alle Knoten sind über zwei Drähte miteinander verbunden. Diese beiden Drähte bilden eine verdrillte Leitung und sind mit einem Wellenwiderstand von 120 Ω verbunden.
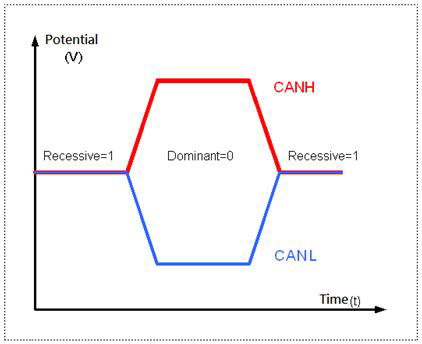
Wenn der CAN-Bus ein dominantes (0) Signal überträgt, wird der CAN_H-Anschluss auf eine hohe Stufe angehoben und CAN_L auf eine niedrige Stufe abgesenkt. Bei Übertragung des rezessiven (1) Signals wird der CAN_H- oder CAN_L-Anschluss nicht beeinflusst. Das dominante Signal von CAN_H und CAN_L weist eine nominale Differentialspannung von 2 V auf.
Signalerscheinungsbilder von der Bitübertragungsschicht:
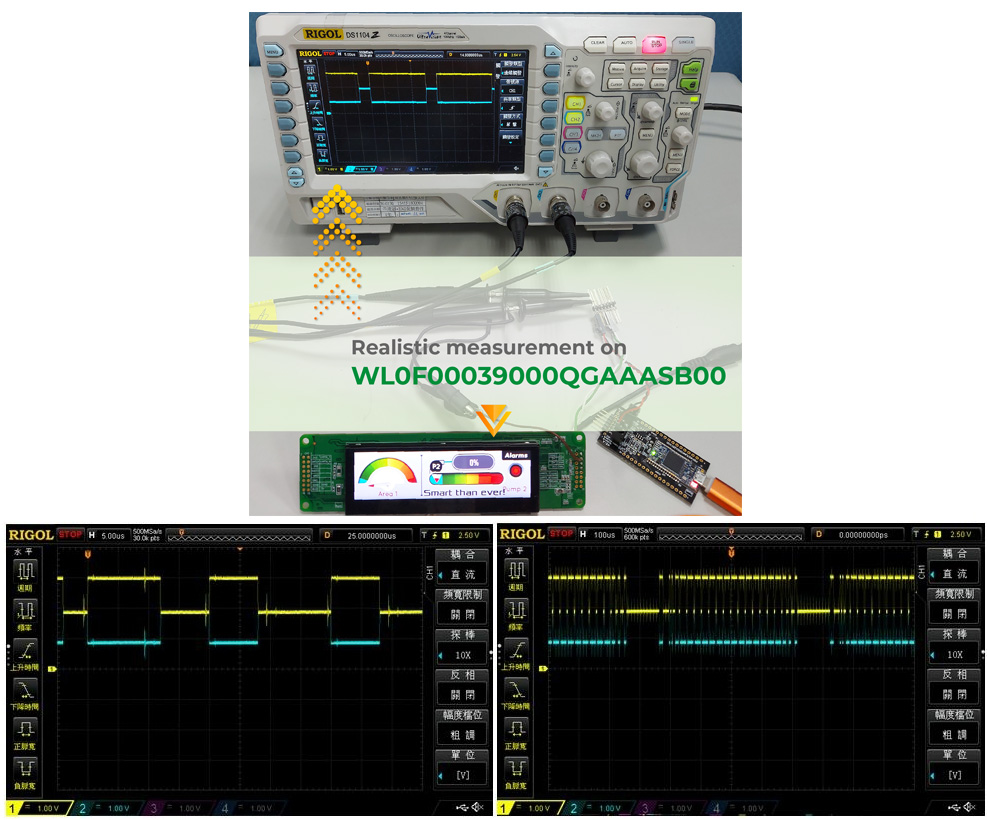
Realistische Messung am WL0F00039000QGAAASB00 CAN_H/CAN_L:
Firmwaremerkmale:
Jeder einzelne Knoten kann Informationen senden und empfangen, aber nicht gleichzeitig. Eine Meldung oder ein Datenübertragungsblock enthält in der Hauptsache einen maximal acht Datenbyte großen Identifizierungscode (ID), der die Priorität der Informationen ausweist. CRC, ACK und andere Teile des Datenübertragungsblocks sind ebenfalls Teil der Meldung.
Überträgt ein Knoten ein dominantes (0) Bit und ein anderer Knoten ein rezessives (1) Bit, entsteht ein Konflikt im Bus, wobei letztlich das dominante Bit „gewinnt“. Dies bedeutet, dass Informationen höherer Priorität nicht in Verzug geraten. Knoteninformationen geringerer Priorität werden automatisch nach dem dominanten Bit übertragen, wobei eine neuerliche Übertragung nach 6 Taktbits versucht wird. Dadurch eignet sich CAN als ein auf sofortige Priorität beruhendes Kommunikationssystem.
Die genaue Spannung von Logic 0 oder Logic 1 hängt von der verwendeten Bitübertragungsschicht ab, wobei allerdings nach dem CAN-Grundprinzip jeder einzelne Knoten die Daten des CAN-Netzwerks überwachen muss, auch der sendende Knoten. Wird Logic 1 von allen Knoten gleichzeitig übertragen, sehen alle Knoten dieses Logic 1-Signal, auch der sendende und der empfangende Knoten. Wird ein Logic 0-Signal von allen sendenden Knoten gleichzeitig übertragen, sehen alle Knoten dieses Logic 0-Signal. Wird ein Logic 0-Signal von einem oder mehreren sendenden Knoten übertragen, ein Logic 1-Signal aber von einem oder mehreren sendenden Knoten, sehen alle Knoten, einschließlich der Knoten, die ein Logic 1-Signal übertragen, auch das Logic 0-Signal. Überträgt ein Knoten ein Logic 1-Signal, sieht aber ein Logic 0-Signal, erkennt er, dass ein Konflikt in der Leitung vorliegt, und meldet sich ab. Über dieser Vorgang meldet sich jeder Knoten ab, der Logic 1 überträgt, oder er verliert seine Entscheidungsmöglichkeit, wenn Logic 0 von anderen Knoten übertragen wird. Der Knoten, dessen Entscheidungsmöglichkeit verloren ging, wird die Informationen später erneut in die Warteschlange setzen, und der Bitstream des CAN-Datenübertragungsblocks wird solange fehlerfrei fortgesetzt, bis nur ein sendender Knoten übrig ist. Dies bedeutet, dass der Knoten, der das erste Logic 1-Signal überträgt, seine Entscheidungsmöglichkeit verliert. Da alle Knoten beim Start eines CAN-Datenübertragungsblocks einen 11-Bit-Identifizierungscode (oder 29-Bit unter CAN 2.0B) übertragen, besitzt der sendende Knoten mit dem niedrigsten Identifizierungscode mehr 0s am Anfang. Jener Knoten gewinnt den Entscheidungswettkampf und besitzt die höchste Priorität.
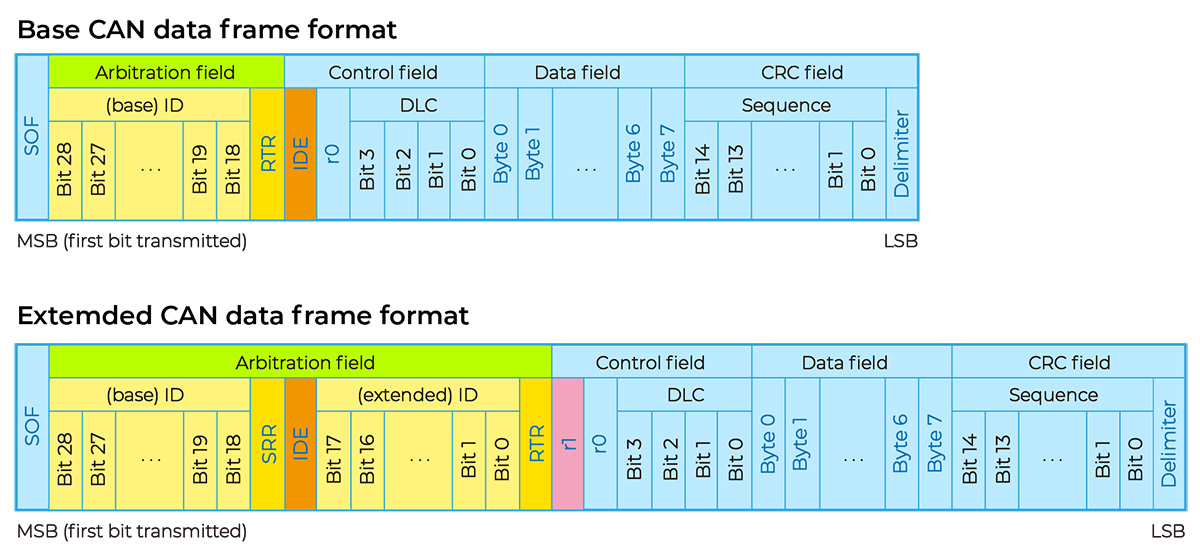
Datenformat von CAN 2.0A/B:
Erscheinungsbilder des CAN-Bus-Datenverkehrs:
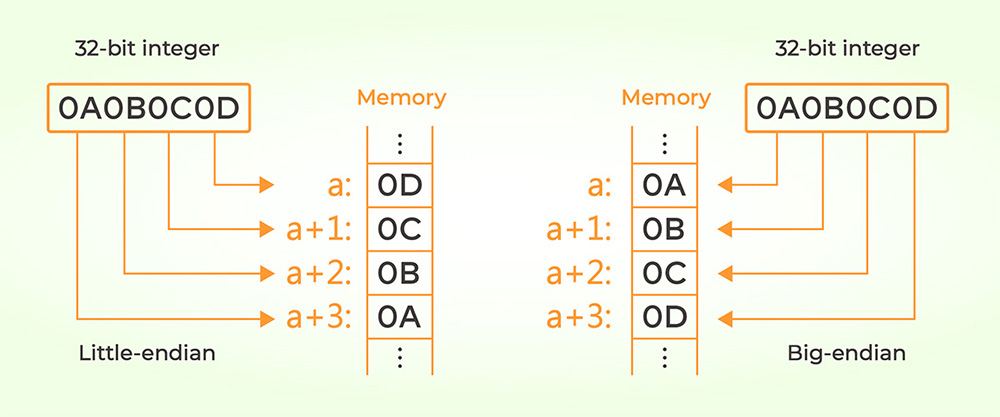
Datenabfolgen in Nutzlast:
Abschließende Überlegungen:
Mit Hilfe der CAN-Bus-Merkmale erhalten wir 5 Vorteile.
- Geringe Kosten: ECUs (elektronische Steuergeräte) kommunizieren über eine einzige CAN-Schnittstelle, wobei der CAN-Bus weniger Probleme bereitet, ein leichtes Gewicht besitzt und geringe Kosten verursacht.
- Zentralisiert: Das CAN-Bus-System ermöglicht eine sämtliche ECUs übergreifende zentrale Fehlerdiagnose (z. B. OBD-II) und Konfiguration.
- Widerstandsfähig: Die Bitübertragungsschicht des Systems ist hinsichtlich Subsysteme und EMV (elektromagnetische Kompatibilität) kaum störanfällig.
- Effizient: CAN-Meldung werden priorisiert und über IDs bitweise entschieden, sodass IDs mit der höchsten Priorität nicht unterbrochen werden.
- Flexibel: Jedes ECU enthält einen Chip für den Empfang aller übertragenen Meldungen, der ihre Relevanz festgelegt und dementsprechend handelt - dies ermöglicht eine problemlose Modifizierung und Einbeziehung von zusätzlichen Knoten.
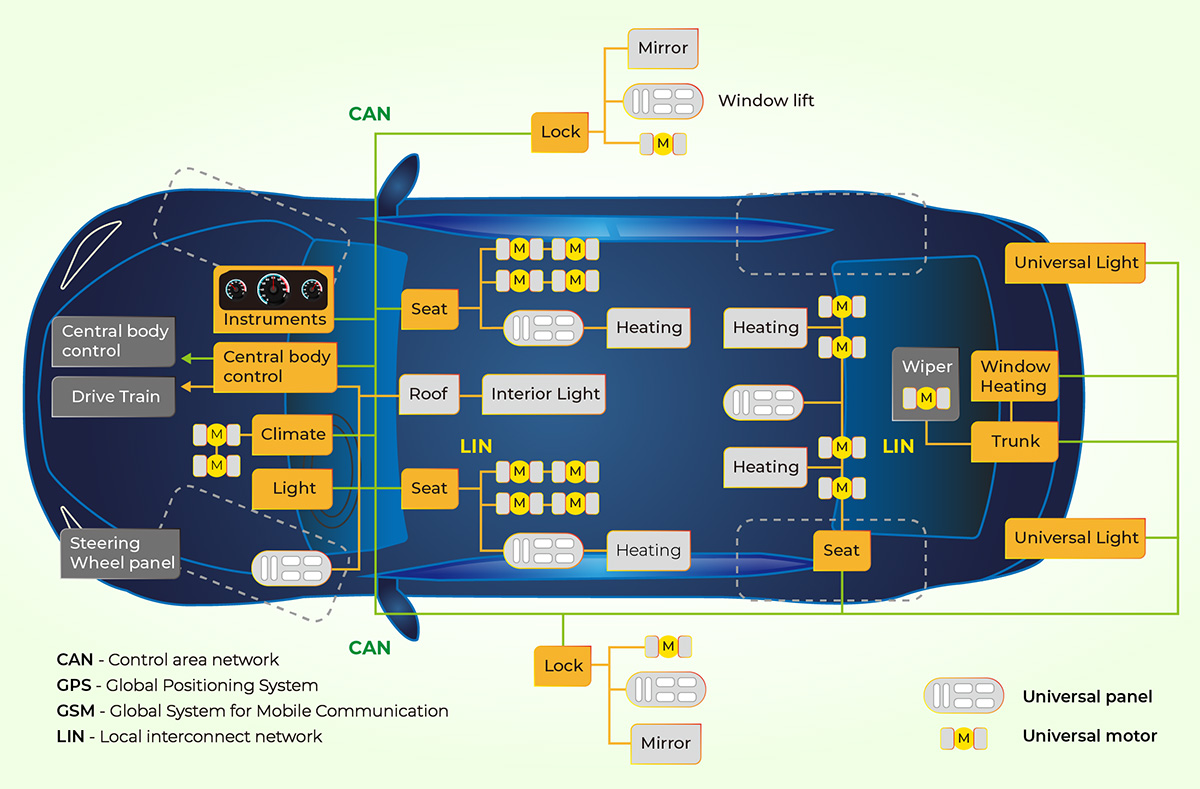
Einige Anwendungsbeispiele:
- Automobile (Fahrzeuginstrumente, ABS, OBD-II usw.).
- Transportsysteme (Schienenfahrzeuge, Flugzeuge, Schiffe usw.).
- Mobile Maschinen (Stapelvorrichtung/Gabelstapler, Bauwesen, Landwirtschaft usw.).
- Steuersysteme von Industriemaschinen (industrielle Automatisierung, Informationsmanagement usw.).
- Wohnhaus- und Gebäudeautomatisierung (Heizung, Lüftung, Klimatechnik, Aufzüge usw.).
- Automatisierte medizinische Geräte und Laborvorrichtungen.
Einschränkungen:
- CANopen: Es gibt eine 11-Bit-CAN-ID bestehend aus einem 4-Bit-Funktionscode und einer 7-Bit-Knoten-ID. Demzufolge sind eindeutige Adressen für bis zu 127 Knoten auf einem Bus verfügbar.
- J1939 verfügt über eine 8-Bit-Geräteadresse, die maximal 255 Knoten-IDs entspricht. Die Adresse 255 wird für Broadcasts verwendet und 254 ist für die Netzwerkverwaltung reserviert. Demzufolge sind eindeutige Adressen für 253 Knoten auf einem Bus verfügbar.
- Für die Kommunikation ist eine geringe Bandbreite verfügbar, die eine hohe Geschwindigkeit in Abhängigkeit von der Entfernung aufweist.