


我们重视您的隐私
通过点击「允许所有 Cookie」,代表您同意在您的设备上存储 Cookie 以增强网站浏览体验、分析网站使用情况并协助我们的营销和网站效能优化工作。您可以在我们的隐私权政策中找到有关于此的更多信息。
Winstar近年来持续思考如何为客户提供全方位服务,并积极推出SmartDisplay产品,首批推出的CAN系列SmartDisplay便是以此为出发点而上架的智能型显示器。到底CAN接口是什么?作用原理为何?又能为顾客带来什么样的好处呢?以下解说带大家一起了解:
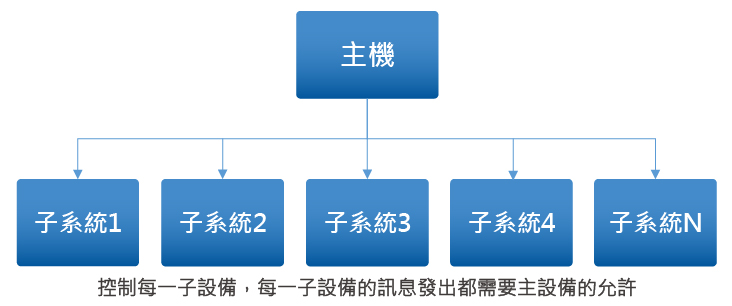
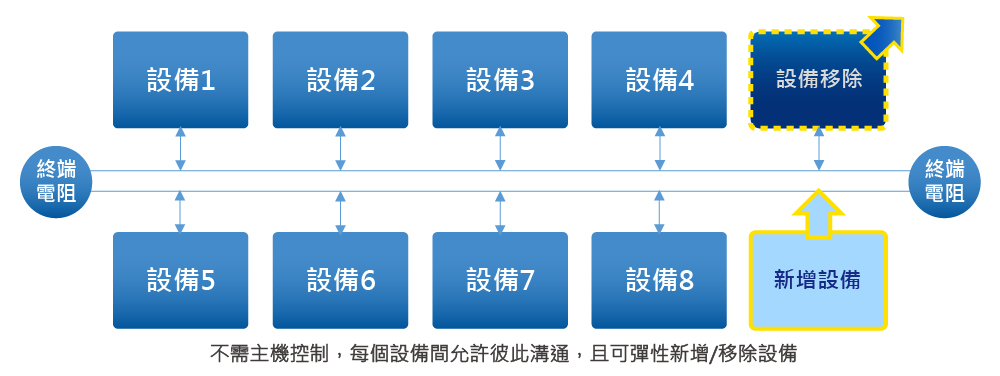
CAN (Controller Area Network, 域控制器)是一种功能强大的车用标准通讯接口。相较于其他通讯接口,例如RS485系统,其基本架构一定要有一个主机(Master)作为控制端,并且每一子设备(Slave)的发言权都被主机监控;CAN提供了更佳灵活的通讯应用,其不需要主机控制。
CAN使用广播机制同一网域上的电子控制器(ECU, Electronic Control Unit),彼此间即可相互发言(通讯),且每一个设备之间可透过软件的设定,使用唯一且独立的讯息标识符(Message Identifier)来定义各个设备发言的先后顺序。
各设备在CAN系统中,因为每一个设备被赋予的讯息标识符都是唯一且独立,使得CAN具备很好的弹性调整能力,可以在不做任何软、硬件的变动下,灵活且简单地在现有网络中进行设备的增加或移除。另外,讯号的传输不须建立在主机中,也就是说不论是新增或是移除设备,都不会影响到其他设备的运作,增加了网域内设备使用的便利性。
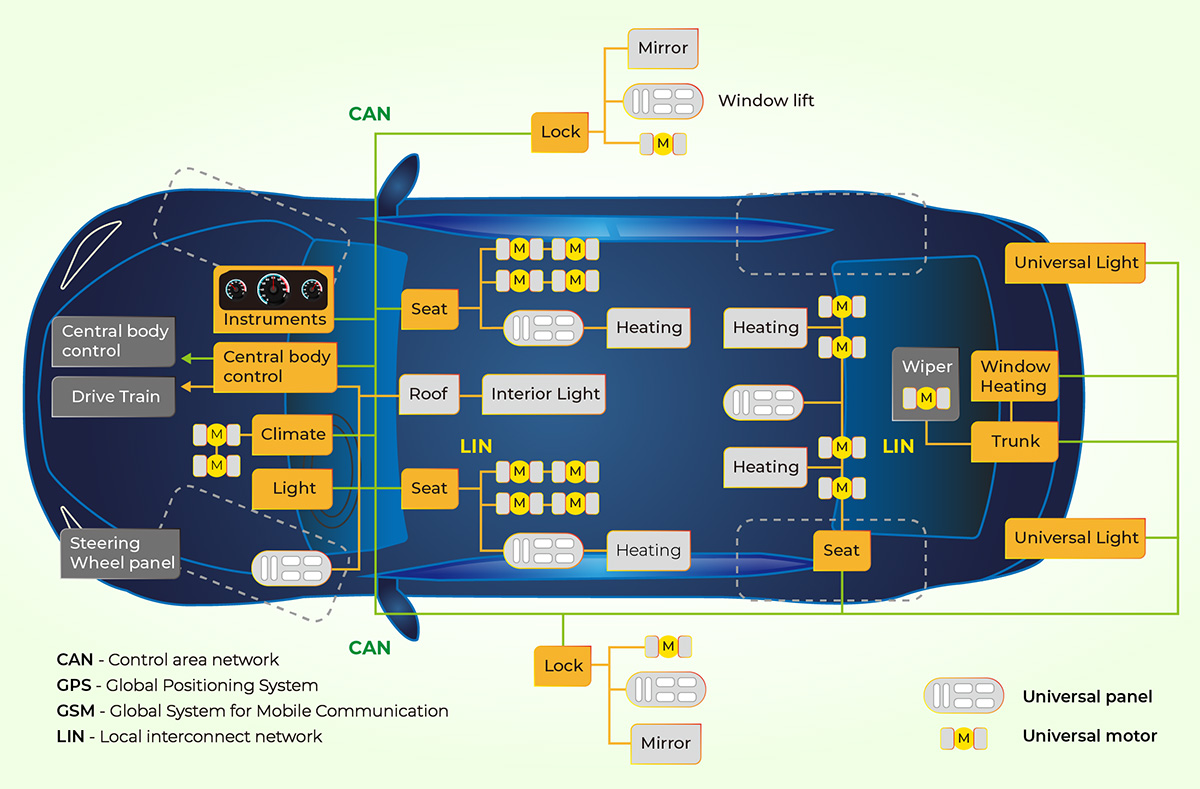
CAN bus目前最主要的应用领域为车用市场,但因CAN bus接口使用唯一讯息标识符进行讯号的传送接收,以及网域内的设备可弹性地新增或移除,使得CAN能完全满足数据沟通时的可靠性与实时回馈需求,这也是为什么近年来 CAN bus的应用从车用不断扩展至工控、医疗和其它领域的原因。
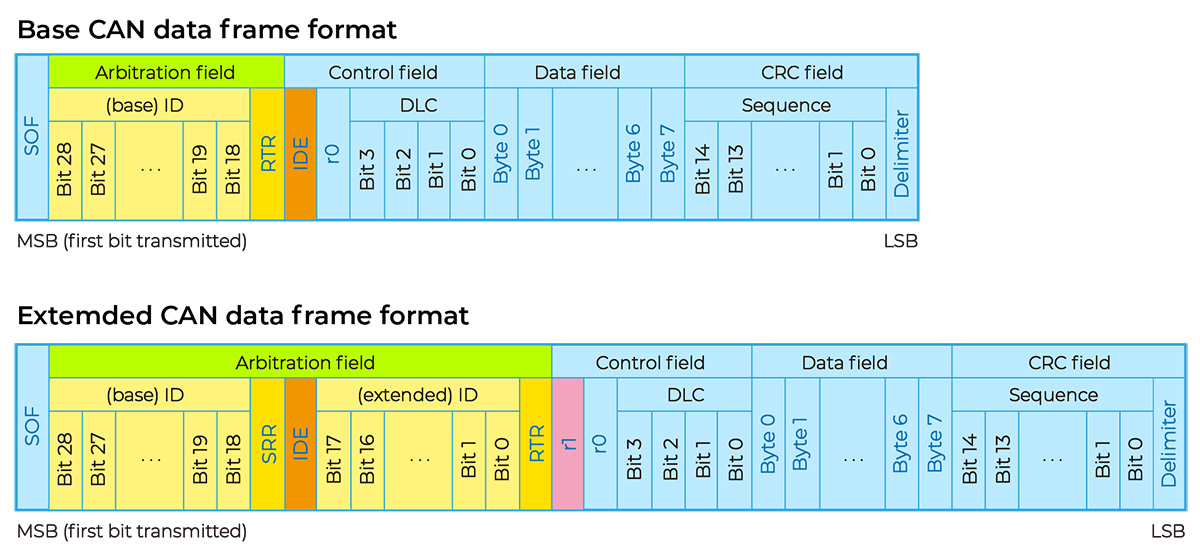
BOSCH 至今已发布数个版本的 CAN bus规范,其中1991年发布CAN 2.0并将规范分为两部分: A部分(CAN 2.0A),适用于11位标识符的标准格式,与B部分(CAN 2.0B),适用于29位标识符的扩充格式。
1993年,国际标准化组织(ISO)发布ISO11898作为CAN的标准。而后CAN标准又被重新编译成三个部分:
- ISO11898-1,涵盖软件部份的数据链路层。
- ISO11898-2,涵盖硬件部份、高速CAN bus的物理层。
- ISO11898-3,补充硬件部份低速 CAN bus的物理层,以及CAN bus的容错规范。
2008年,在美国销售的所有车辆都必须导入CAN作为其通讯协议之一。
2012年,BOSCH发布更有弹性的CAN_FD(Flexible Data rate) 1.0通讯协议,当网域内的设备因彼此之间传输速率不同而产生冲突时,CAN_FD允许设备的发言顺序决定后,切换到更快的比特率进行数据的传输。而CAN FD协议也能向下兼容现有的CAN 2.0架构,因此支持CAN FD的设备也可以和现有的CAN 2.0设备并存于同一网域中。
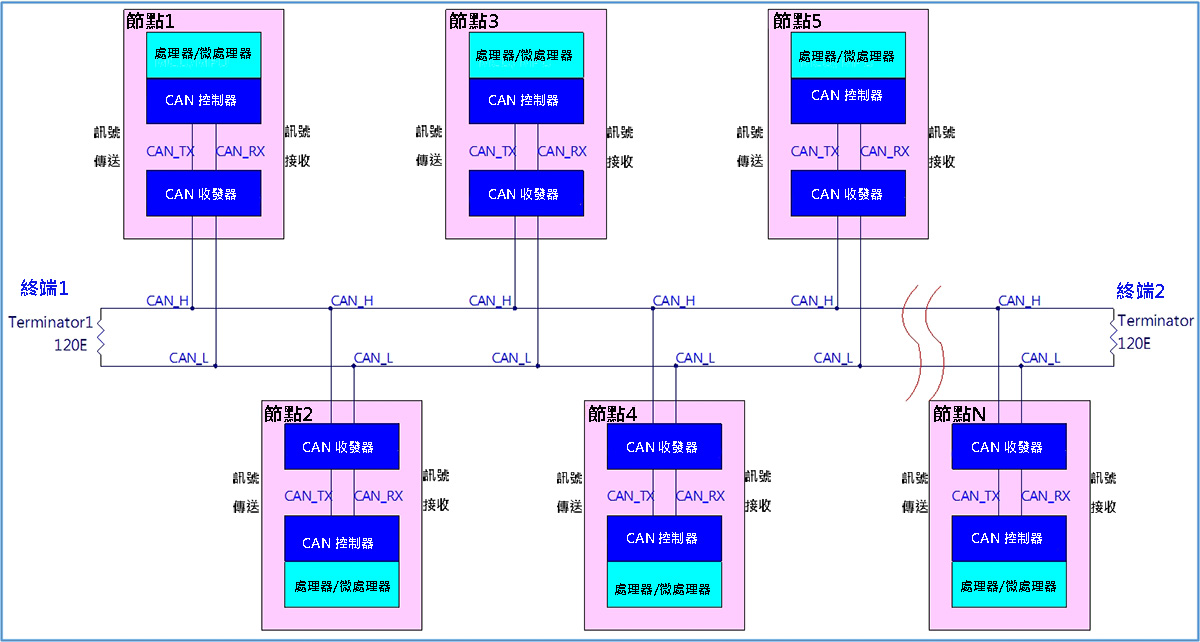
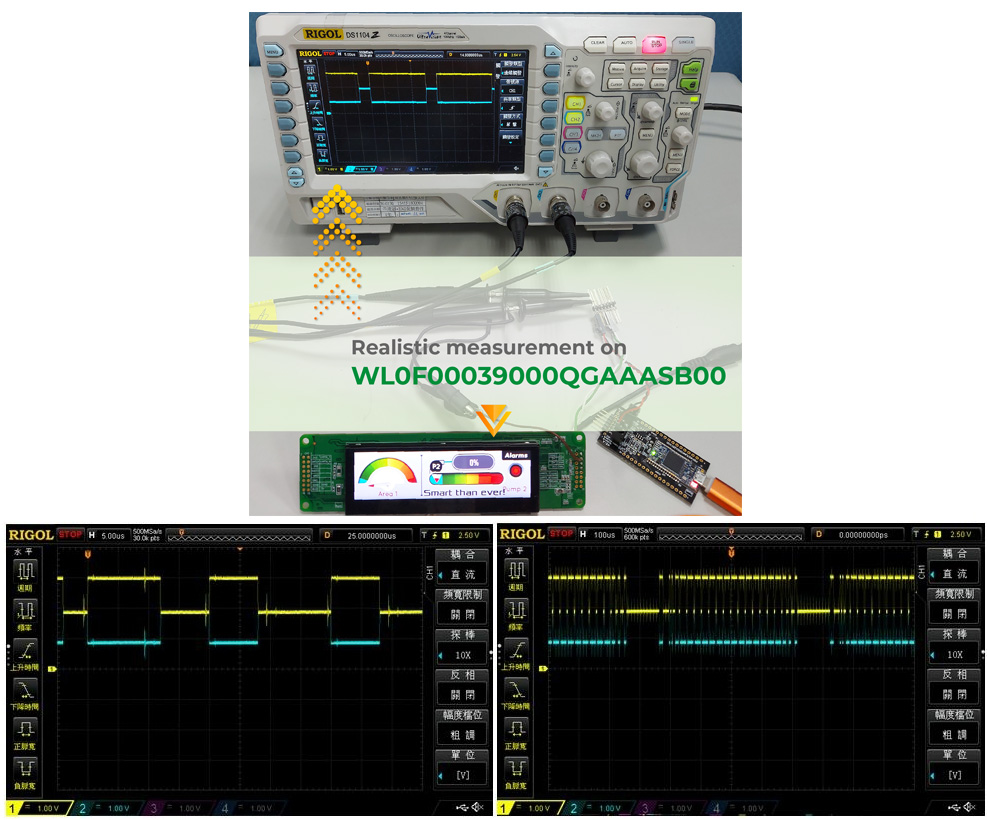
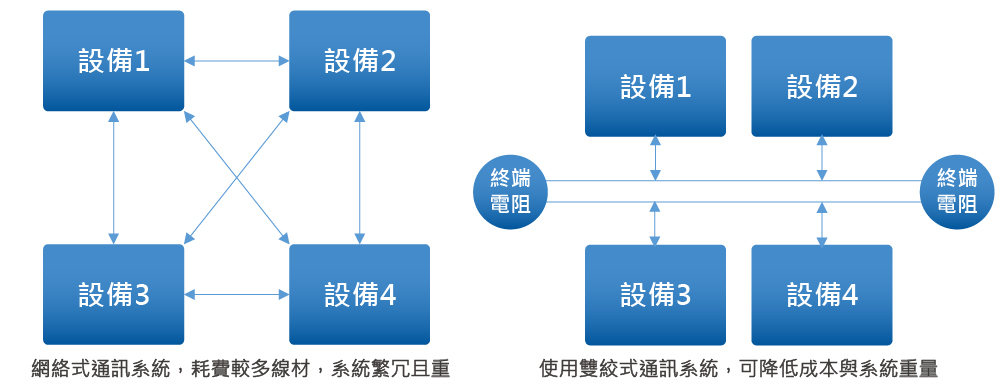
CAN网域内的所有设备(节点)只须透过两条扭绞在一起的导线即可进行讯号的传输,按CAN的ISO规范,双绞线的终端会以120Ω的阻抗连接以维持讯号的稳定与匹配。
在讯息传递上,每个设备(节点)都可以发送、接收信息,但信息的传送与接收不能同时,一个讯息或帧(Frame)主要包含:

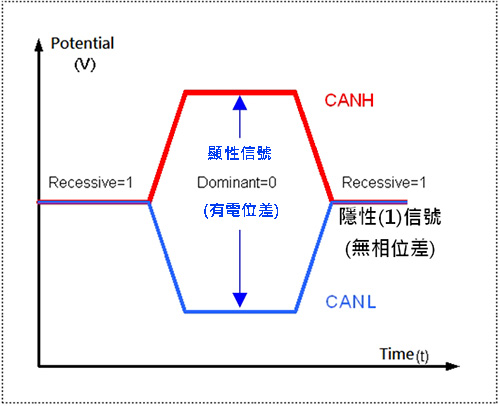
当一设备传送显性(Dominate)讯号(0),而另一个设备传送隐性(1)讯号,此时网络线(bus)上便产生讯号冲突,此时仲裁机制由显性(Dominate)信号(0)取得优先发送权,而显性(Dominate)讯号传送后,隐性讯号将在极短时间内(6个频率位)再次重新发送。这代表顺位较高的设备,其讯息不会被延迟,而顺位较低的设备即使讯息后送,也不会被系统忽略掉,这样的机制使得CAN非常适合作为实时的通讯系统。
实际的显性(Dominate)讯号(0)逻辑或隐性(1)讯号逻辑取决于所使用的物理层,但CAN的讯号传送原则会要求每个设备去监控整个网域上的包含自身所发出的数据数据。
失去仲裁的设备,将在极短时间内再次重新发送讯息,网域内的判断逻辑会针对同时传送讯息的各设备不断进行仲裁,直到最后一个设备发送出讯息。


通过点击「允许所有 Cookie」,代表您同意在您的设备上存储 Cookie 以增强网站浏览体验、分析网站使用情况并协助我们的营销和网站效能优化工作。您可以在我们的隐私权政策中找到有关于此的更多信息。