


我們重視您的隱私
通過點擊「允許所有 Cookie」,代表您同意在您的設備上存儲 Cookie 以增強網站瀏覽體驗、分析網站使用情況並協助我們的行銷和網站效能優化工作。您可以在我們的隱私權政策中找到有關於此的更多資訊。

Winstar近年來持續思考如何為客戶提供全方位服務,並積極推出SmartDisplay產品,首批推出的CAN系列SmartDisplay便是以此為出發點而上架的智能型顯示器。到底CAN介面是什麼?作用原理為何?又能為顧客帶來什麼樣的好處呢?以下解說帶大家一起了解:
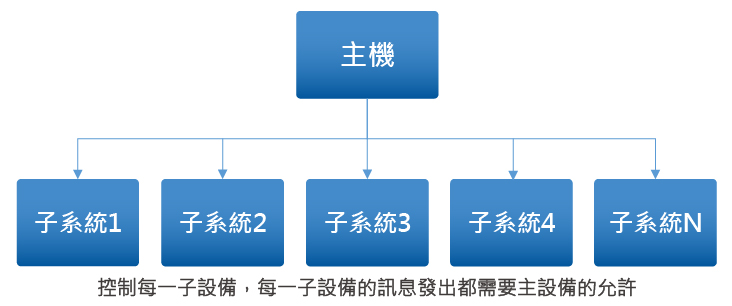
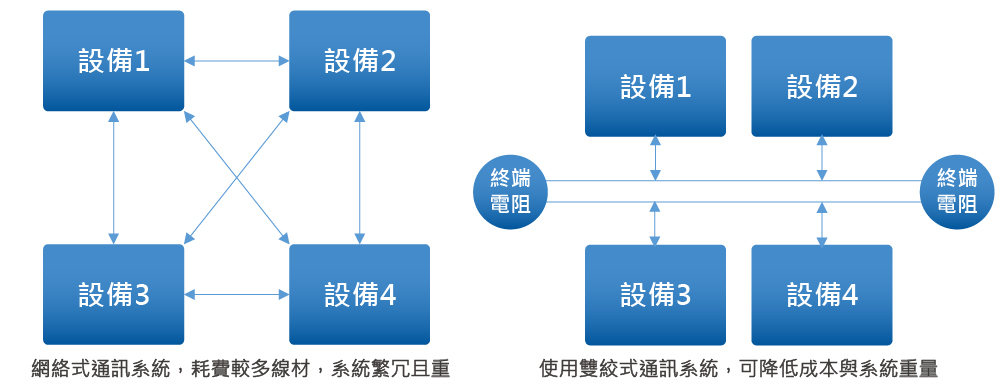
CAN (Controller Area Network, 網域控制器)是一種功能強大的車用標準通訊介面。相較於其他通訊介面,例如RS485系統,其基本架構一定要有一個主機(Master)作為控制端,並且每一子設備(Slave)的發言權都被主機監控;CAN提供了更佳靈活的通訊應用,其不需要主機控制。
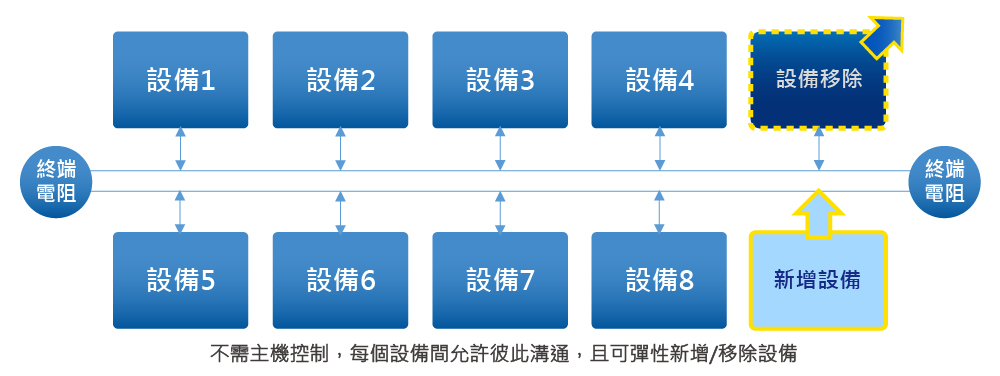
CAN使用廣播機制同一網域上的電子控制器(ECU, Electronic Control Unit),彼此間即可相互發言(通訊),且每一個設備之間可透過軟體的設定,使用唯一且獨立的訊息識別碼(Message Identifier)來定義各個設備發言的先後順序。
各設備在CAN系統中,因為每一個設備被賦予的訊息識別碼都是唯一且獨立,使得CAN具備很好的彈性調整能力,可以在不做任何軟、硬體的變動下,靈活且簡單地在現有網絡中進行設備的增加或移除。另外,訊號的傳輸不須建立在主機中,也就是說不論是新增或是移除設備,都不會影響到其他設備的運作,增加了網域內設備使用的便利性。
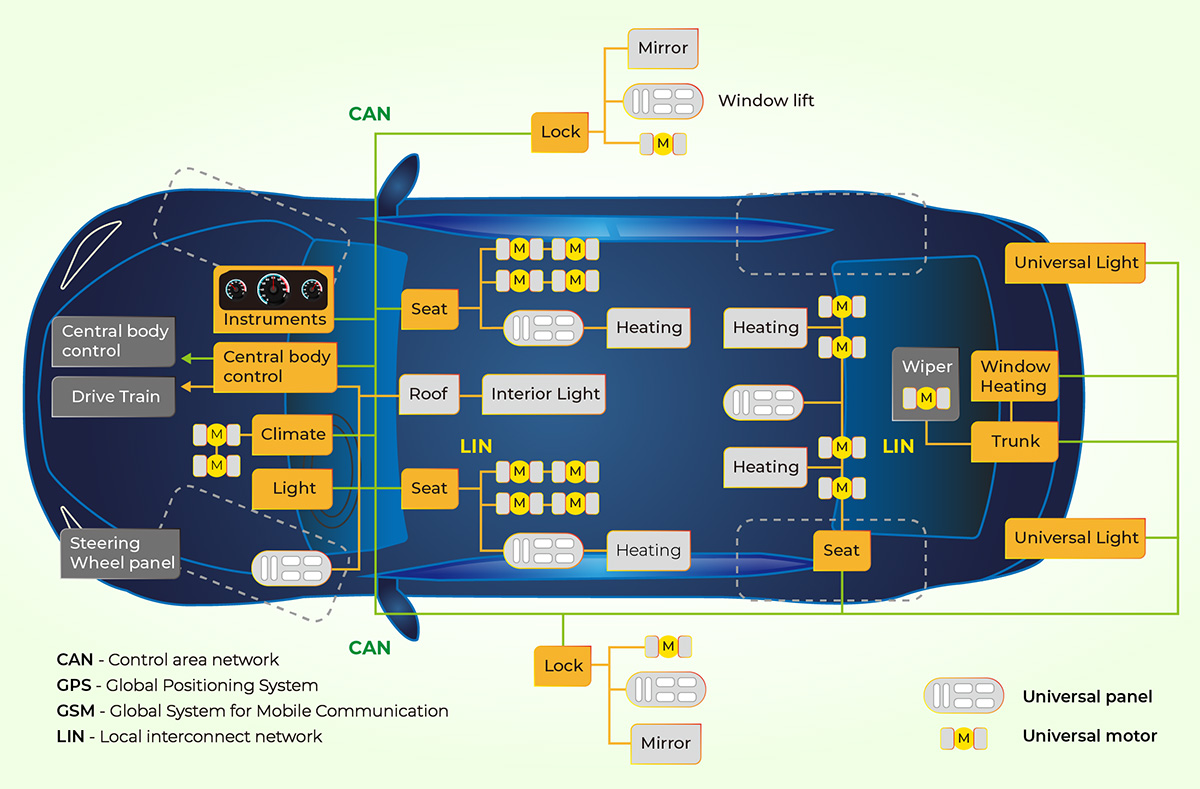
CAN bus目前最主要的應用領域為車用市場,但因CAN bus介面使用唯一訊息識別碼進行訊號的傳送接收,以及網域內的設備可彈性地新增或移除,使得CAN能完全滿足資料溝通時的可靠性與即時回饋需求,這也是為什麼近年來 CAN bus的應用從車用不斷擴展至工控、醫療和其它領域的原因。
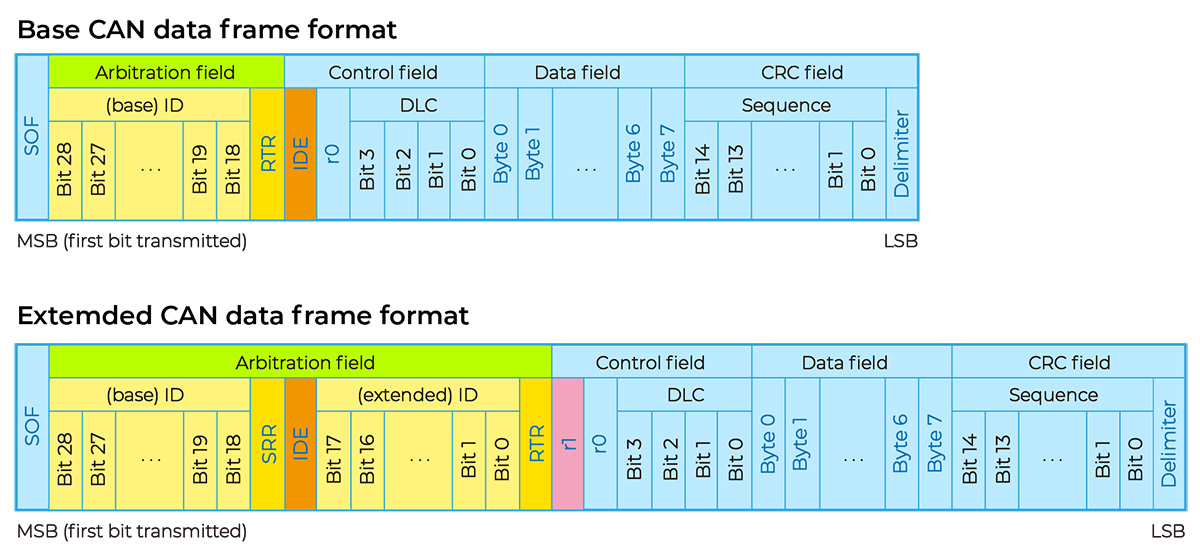
BOSCH 至今已發布數個版本的 CAN bus規範,其中1991年發布CAN 2.0並將規範分為兩部分: A部分(CAN 2.0A),適用於11位元識別碼的標準格式,與B部分(CAN 2.0B),適用於29位元識別碼的擴充格式。
1993年,國際標準化組織(ISO)發布ISO11898作為CAN的標準。而後CAN標準又被重新編譯成三個部分:
- ISO11898-1,涵蓋軟體部份的資料連結層。
- ISO11898-2,涵蓋硬體部份、高速CAN bus的實體層。
- ISO11898-3,補充硬體部份低速 CAN bus的實體層,以及CAN bus的容錯規範。
2008年,在美國銷售的所有車輛都必須導入CAN作為其通訊協議之一。
2012年,BOSCH發布更有彈性的CAN_FD(Flexible Data rate) 1.0通訊協定,當網域內的設備因彼此之間傳輸速率不同而產生衝突時,CAN_FD允許設備的發言順序決定後,切換到更快的位元速率進行資料的傳輸。而CAN FD協定也能向下相容現有的CAN 2.0架構,因此支援CAN FD的設備也可以和現有的CAN 2.0設備並存於同一網域中。
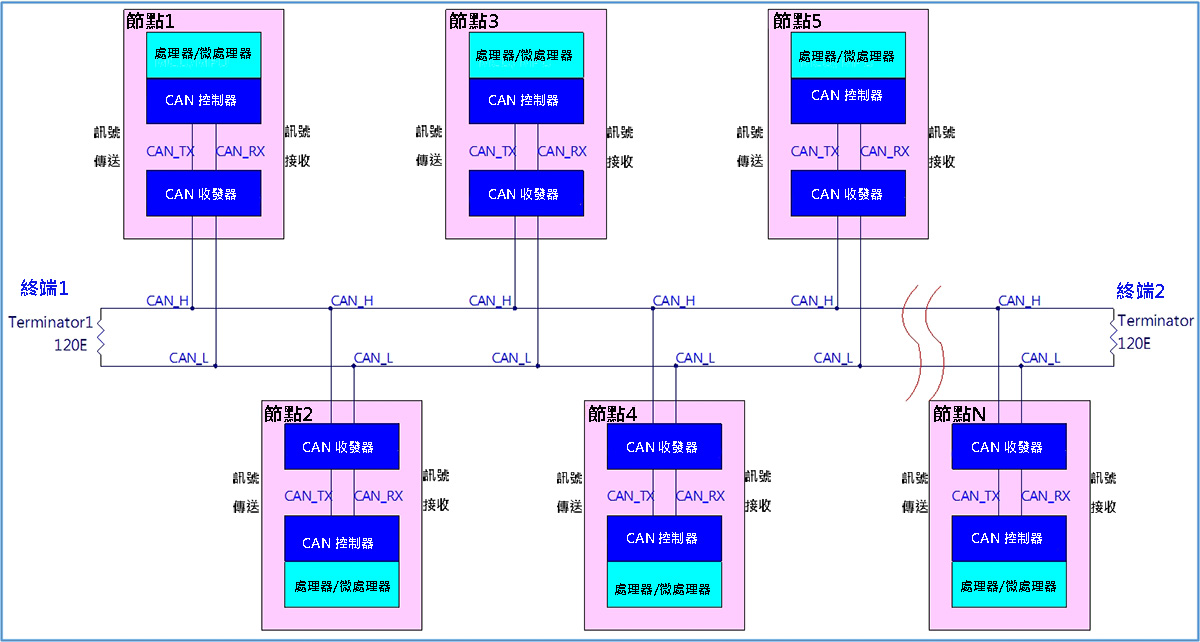
CAN網域內的所有設備(節點)只須透過兩條扭絞在一起的導線即可進行訊號的傳輸,按CAN的ISO規範,雙絞線的終端會以120Ω的阻抗連接以維持訊號的穩定與匹配。
在訊息傳遞上,每個設備(節點)都可以發送、接收信息,但信息的傳送與接收不能同時,一個訊息或幀(Frame)主要包含:

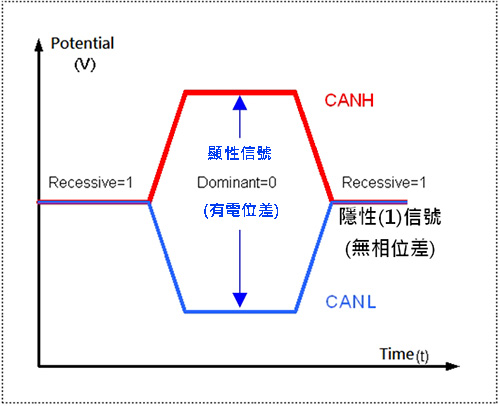
當一設備傳送顯性(Dominate)訊號(0),而另一個設備傳送隱性(1)訊號,此時網絡線(bus)上便產生訊號衝突,此時仲裁機制由顯性(Dominate)信號(0)取得優先發送權,而顯性(Dominate)訊號傳送後,隱性訊號將在極短時間內(6個時脈位元)再次重新發送。這代表順位較高的設備,其訊息不會被延遲,而順位較低的設備即使訊息後送,也不會被系統忽略掉,這樣的機制使得CAN非常適合作為即時的通訊系統。
實際的顯性(Dominate)訊號(0)邏輯或隱性(1)訊號邏輯取決於所使用的實體層,但CAN的訊號傳送原則會要求每個設備去監控整個網域上的包含自身所發出的資料數據。
失去仲裁的設備,將在極短時間內再次重新發送訊息,網域內的判斷邏輯會針對同時傳送訊息的各設備不斷進行仲裁,直到最後一個設備發送出訊息。


通過點擊「允許所有 Cookie」,代表您同意在您的設備上存儲 Cookie 以增強網站瀏覽體驗、分析網站使用情況並協助我們的行銷和網站效能優化工作。您可以在我們的隱私權政策中找到有關於此的更多資訊。