Önsöz
Winstar, müşterilerine kapsamlı bir çözüm hizmeti sunmaya devam ediyor ve bu doğrultuda Akıllı Ekran Serisi ürünlerini aktif olarak piyasaya sürdü. Piyasaya sürülen ilk CAN serisi Akıllı Ekran, başlangıç noktası olarak buna dayanmaktadır. CAN Veriyolu nedir? Nasıl çalışır? Kullanıcılara ne gibi avantajlar sağlayabilir? Aşağıda sunulan ilave bilgileri okuyalım.
Giriş
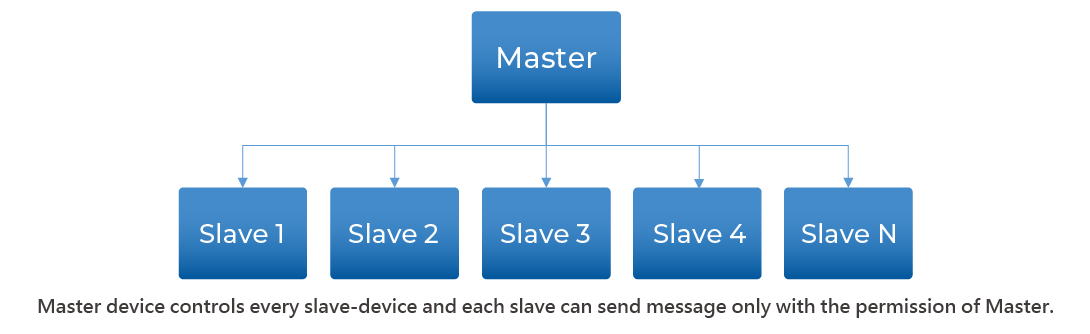
CAN (Denetleyici Alan Ağı), zengin özelliklere sahip bir veriyolu standardıdır. Ağdaki ECU'ların (Elektronik Kontrol Ünitesi) bir ana bilgisayara ihtiyaç duymadan birbirleriyle iletişim kurmasına izin verecek şekilde tasarlanmıştır; RS485 arayüzünün aksine, temelde kontrol ucu olarak bir ana bilgisayara (Master) sahip olmalıdır; ancak CAN, ana bilgisayar kontrolü gerektirmeyen daha iyi ve esnek iletişim uygulamaları sağlar.
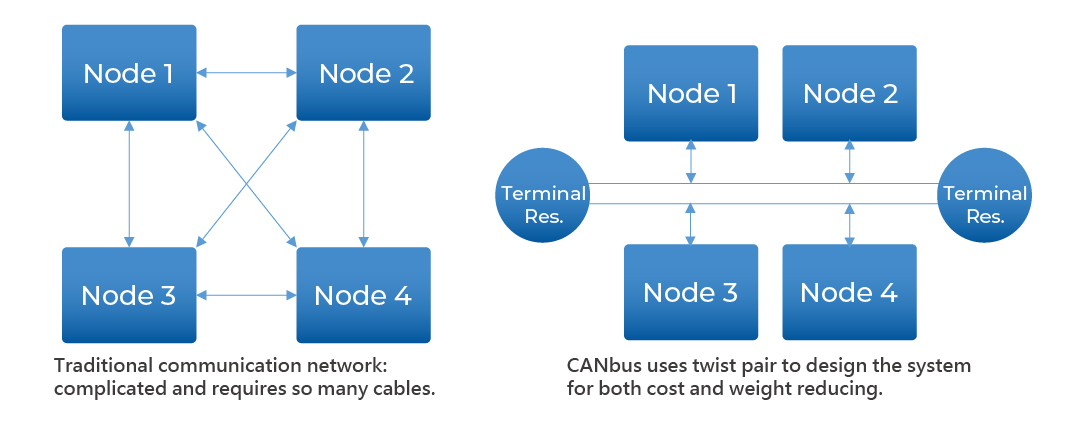
RS485 Sistem Topolojisi
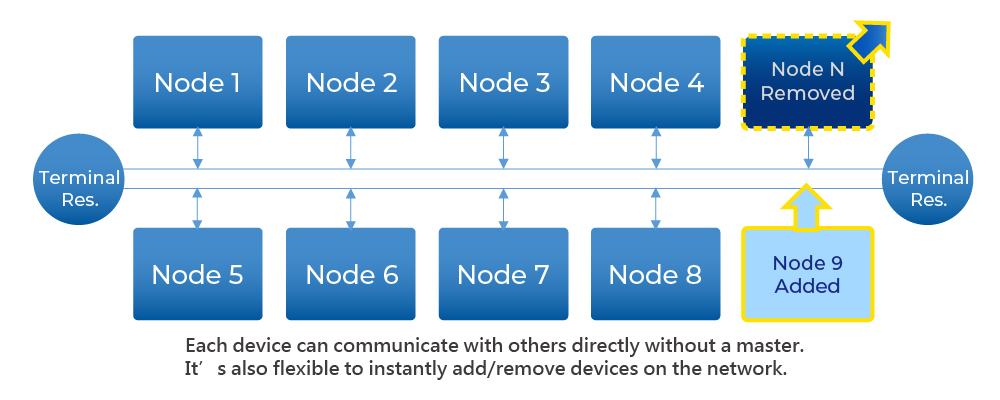
CAN Veriyolu Sistem Topolojisi
CAN, mesaj yönelimli protokole dayalı bir Yayın İletişim Mekanizmasıdır. Bilgilerin içeriğine göre, belirli bir istasyon adresi (Düğüm kimliği) atamak yerine, mesajların teslim edilmek üzere öncelik sırasını tanımlamak için Mesaj Tanımlayıcısını (her tanımlayıcı tüm ağda benzersizdir) kullanır.
Bu nedenle CAN, iyi esnek ayarlama yeteneklerine sahiptir ve yazılım ve donanımda ayarlamalar yapmadan mevcut ağa düğümler ekleyebilir. Ek olarak, mesajların iletimi, ağı yükseltme kolaylığını artıran özel düğüm türlerine dayalı değildir.
CAN veriyolu uygulamaları, veri iletişiminin güvenilirliğini ve gerçek zamanlı talebini tamamen karşılayabilir. CAN veriyolu uygulamasının endüstriyel, tıbbi ve diğer uygulamalara yayılmasının nedeni budur.
Topology figure (Sub-Block):
Tarihçe
BOSCH, CAN veriyolunu 1983'te geliştirdi. CAN, 1986 yılında ABD'nin Detroit, Michigan kentinde düzenlenen Uluslararası Otomotiv Mühendisleri Derneği (SAE) toplantısında resmi olarak duyurulmuştur. İlk CAN denetleyicisi Intel ve Philips tarafından üretildi ve 1987'de piyasaya sürüldü. Dünyanın CAN tabanlı çok hatlı sistemle donatılmış ilk otomobili, 1991'de piyasaya sürülen Mercedes-Benz W140 idi.
BOSCH, CAN spesifikasyonunun birkaç versiyonunu yayınladı. CAN 2.0, 1991 yılında piyasaya sürüldü. Bu spesifikasyon iki bölüme ayrılmıştır; Kısım A (CAN 2.0A), 11 bitlik tanımlama kodlarının kullanıldığı standart biçim için ve Kısım B (CAN 2.0B), 29 bitlik tanımlayıcıların kullanıldığı genişletilmiş biçim için geçerlidir.
1993 yılında, Uluslararası Standardizasyon Örgütü (ISO), CAN standardı ISO11898'i yayınladı. Daha sonra CAN standardı iki bölüm halinde yeniden derlendi: ISO11898-1, veri bağlantısı katmanını kapsıyordu; ISO11898-2, yüksek hızlı CAN veriyolunun fiziksel katmanını kapsıyordu; ISO11898-3 daha sonra duyuruldu ve düşük hızlı CAN veriyolu Fiziksel katmanını ve CAN veriyolu hata toleransı spesifikasyonunu kapsıyordu. Fiziksel katman standartları ISO11898-2 ve ISO11898-3, BOSCH CAN2.0 spesifikasyonuna dahil değildir. Bunlar ISO'dan ayrı olarak satın alınabilirler.
2012'de BOSCH, CAN_FD 1.0'ı veya değişken veri hızlı CAN'ı duyurdu. Bu spesifikasyonda arbitrasyon sonrasına izin verilen farklı bir mimari kullanılır, daha yüksek bir bit hızına geçiş yapılır ve farklı veri uzunlukları iletilir. CAN FD, mevcut CAN 2.0 ağı ile uyumludur; böylece yeni CAN FD cihazı, aynı kontrol ağı üzerinde mevcut CAN cihazı ile bir arada bulunabilir.
1996'dan sonra, Amerika Birleşik Devletleri'nde satılan tüm arabaların ve hafif kamyonların OBD-II standartlarına (Araç Üzerinde Teşhis) uyması gerekiyordu. Avrupa Birliği'nde 2001'den sonra satılan benzinli araçların ve 2004'ten sonra satılan dizel araçların EOBD standartlarına (Avrupa Araç Üzerinde Teşhis) uyması zorunludur. 2008'de ABD'de satılan tüm araçların sinyal protokollerinden biri olarak CAN'ı uygulaması zorunlu hale gelmiştir.
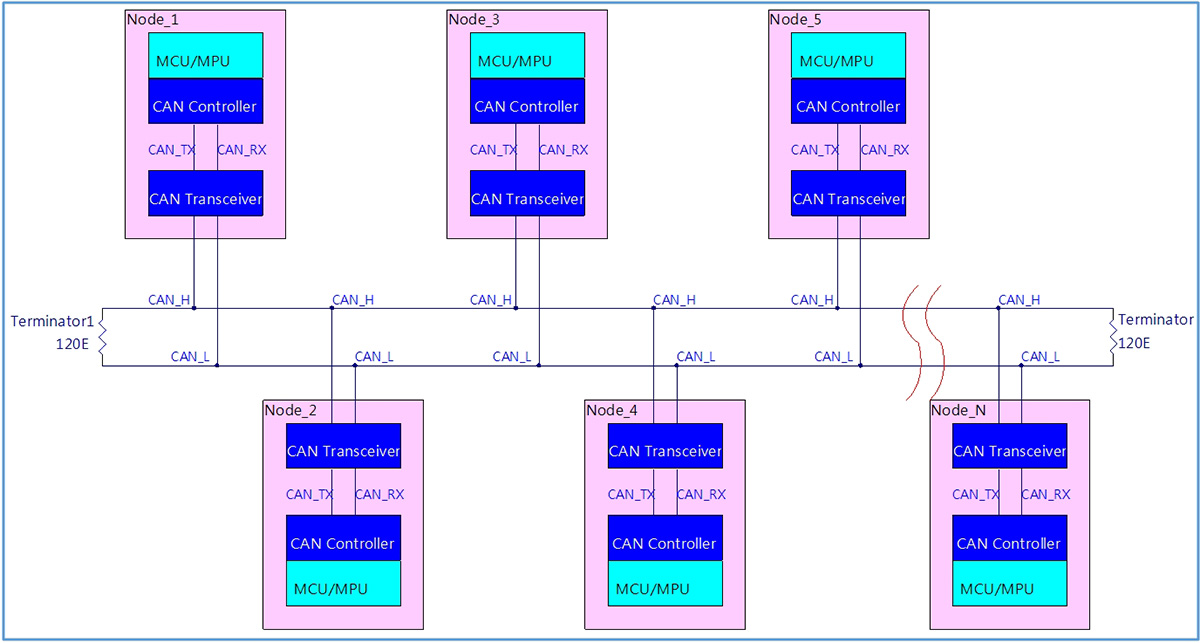
Donanım Özellikleri:
Tüm düğümler iki kabloyla birbirine bağlanır. İki tel, bükümlü bir çift oluşturur ve 120Ω'luk bir karakteristik empedans ile bağlanır.
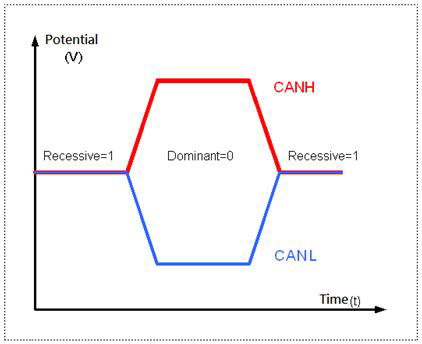
CAN veriyolu baskın (0) bir sinyal ilettiğinde, CAN_H terminalini yüksek bir seviyeye taşır ve CAN_L'yi düşük bir seviyeye çeker. Resesif (1) sinyali iletildiğinde, CAN_H veya CAN_L terminali çalıştırılmaz. Baskın sinyal CAN_H ve CAN_L, 2V nominal diferansiyel gerilime sahiptir.
Fiziksel katmanın sinyal görünümleri:
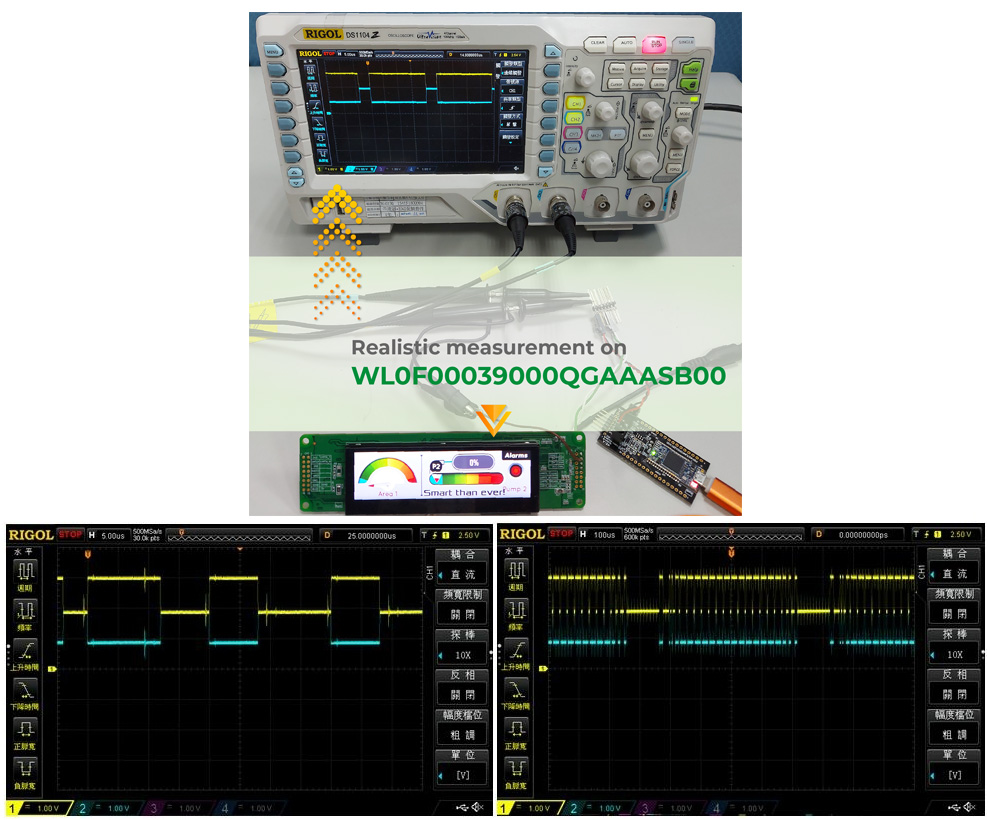
WL0F00039000QGAAASB00 CAN_H/CAN_L'de gerçekçi ölçüm:
Üretici Yazılımı Özellikleri:
Her düğüm bilgi gönderip alabilir, ancak aynı anda değil. Bir mesaj veya çerçeve, temel olarak sekiz veri bayta kadar bilginin önceliğini gösteren bir tanımlama kodu (ID) içerir. CRC (Döngüsel Artıklık Denetimi), ACK (Onay Kabulü) ve diğer çerçeve parçaları da mesajın bir parçasıdır.
Bir düğüm baskın bir (0) biti ve başka bir düğüm resesif (1) biti iletirse, o zaman veriyolunda bir çatışma olur ve nihai sonuç, baskın bitin "kazanması" olur. Bu, daha yüksek öncelikli bilgilerde gecikme olmadığı anlamına gelir. Daha düşük önceliğe sahip düğüm bilgisi baskın bitin sonunda otomatik olarak iletilir ve 6 saat bitinden sonra yeniden iletim denenir. Bu, CAN'ı anlık öncelikli bir iletişim sistemi olarak uygun hale getirir.
Mantık 0 veya 1'in tam voltajı kullanılan fiziksel katmana bağlıdır, ancak CAN'ın temel ilkesi, gönderen düğümün kendisi de dahil olmak üzere her düğümün CAN ağındaki verileri izlemesini gerektirir. Tüm düğümler aynı anda mantık 1’i iletiyorsa, gönderici düğüm ve alıcı düğüm de dahil olmak üzere tüm düğümler bu mantık 1 sinyalini görecektir. Gönderici tüm düğümler aynı anda bir mantık 0 sinyali gönderirse, tüm düğümler bu mantık 0 sinyalini görecektir. Bir veya daha fazla gönderici düğüm bir mantık 0 sinyali ilettiğinde, ancak bir veya daha fazla gönderici düğüm bir mantık 1 sinyali ilettiğinde, bir mantık 1 sinyali ileten düğüm dahil tüm düğümler ayrıca mantık 0 sinyalini görür. Bir düğüm mantık 1 sinyali gönderip düğüm 0 sinyalini gördüğünde, hatta bir anlaşmazlık olduğunu anlayacak ve oturumu kapatacaktır. Bu süreçte, mantık 1'i ileten herhangi bir düğüm, diğer düğümler mantık 0'ı ilettiğinde oturumu kapatır veya arbitrasyon kaybeder. Arbitrasyonu kaybeden düğüm, bilgileri kuyruğa daha sonra yeniden ekler ve CAN çerçevesinin bit akışı, yalnızca bir gönderen düğüm kalana kadar hatasız devam eder. Bu, ilk mantık 1'i ileten düğümün arbitrasyonu kaybettiği anlamına gelir. Bir CAN çerçevesini başlatırken tüm düğümler 11 bitlik (veya CAN 2.0B'de 29 bitlik) bir tanımlama kodu ilettiğinden, en düşük tanımlama koduna sahip gönderici düğüm başlangıçta daha fazla 0 içerir. Bu düğüm arbitrasyonu kazanır ve en yüksek önceliğe sahip olur.
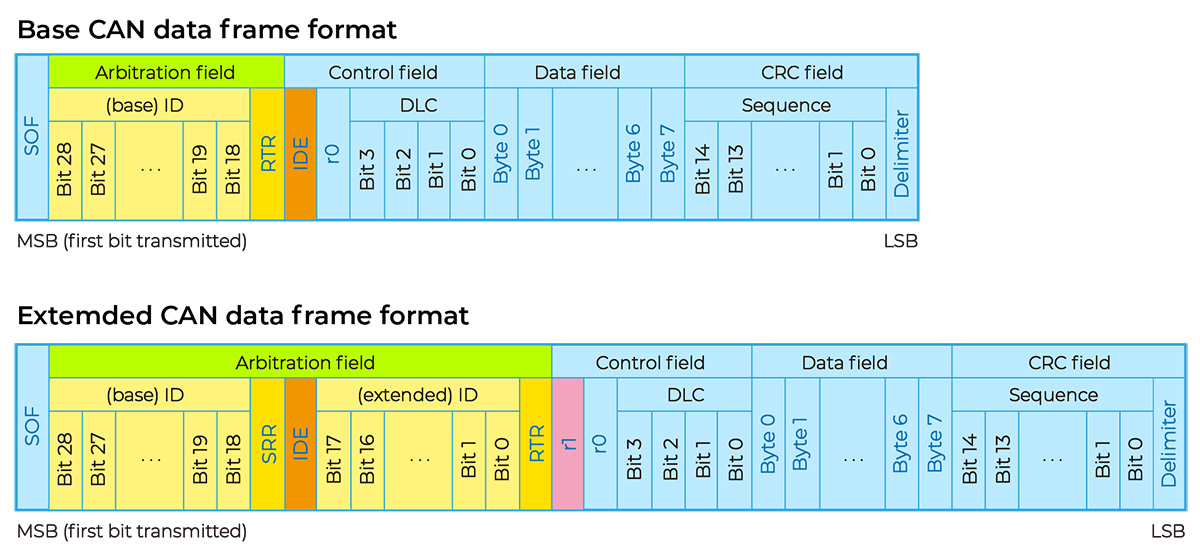
CAN2.0A/B Veri biçimi:
CAN veriyolu trafik verileri şu şekilde görünür:
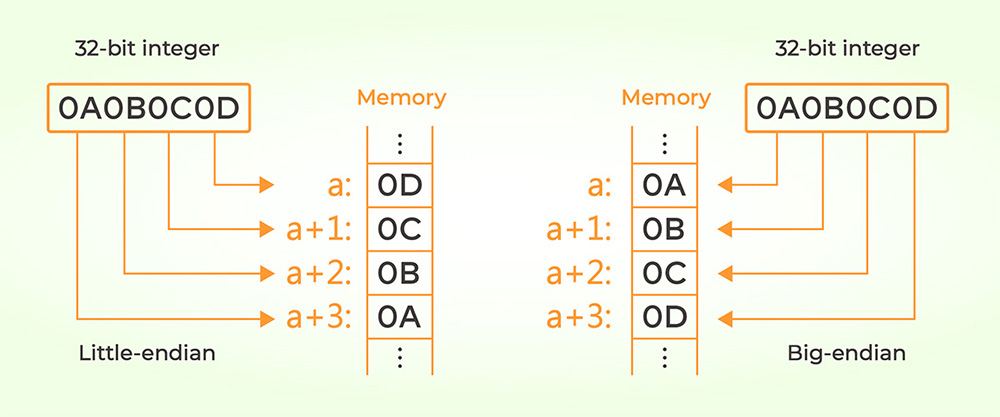
Yararlı yükteki veri dizileri:
Sonuçlar:
CAN veriyolu özelliklerine dayalı olarak sahip olduğumuz 5 avantaj
- Düşük Maliyet: ECU'lar (Elektronik Kontrol Üniteleri) tek bir CAN arayüzü üzerinden iletişim kurar, CAN veriyolu sorunları azaltma, hafiflik ve düşük maliyet sunar.
- Merkezileştirilmiş: CAN veriyolu sistemi, merkezi hata teşhisine izin verir (örn. OBD-II) ve tüm ECU (Motor Kontrol Ünitesi) genelinde yapılandırma.
- Dayanıklı: Sistemin fiziksel katmanı, alt sistemlerin arızalanmasına ve EMC'ye (elektromanyetik uyumluluk) karşı dayanıklıdır.
- Verimlilik: CAN mesajlarına öncelik verilir ve en yüksek önceliğe sahip kimliklerin kesintiye uğramaması için kimlikler aracılığıyla bit düzeyinde arbitrasyon kullanılır.
- Esneklik: Her bir ECU, iletilen tüm mesajları almak, alaka düzeyine karar vermek ve buna göre hareket etmek için bir çip içerir; bu da, ek düğümlerin kolayca değiştirilmesine ve dahil edilmesine olanak tanır
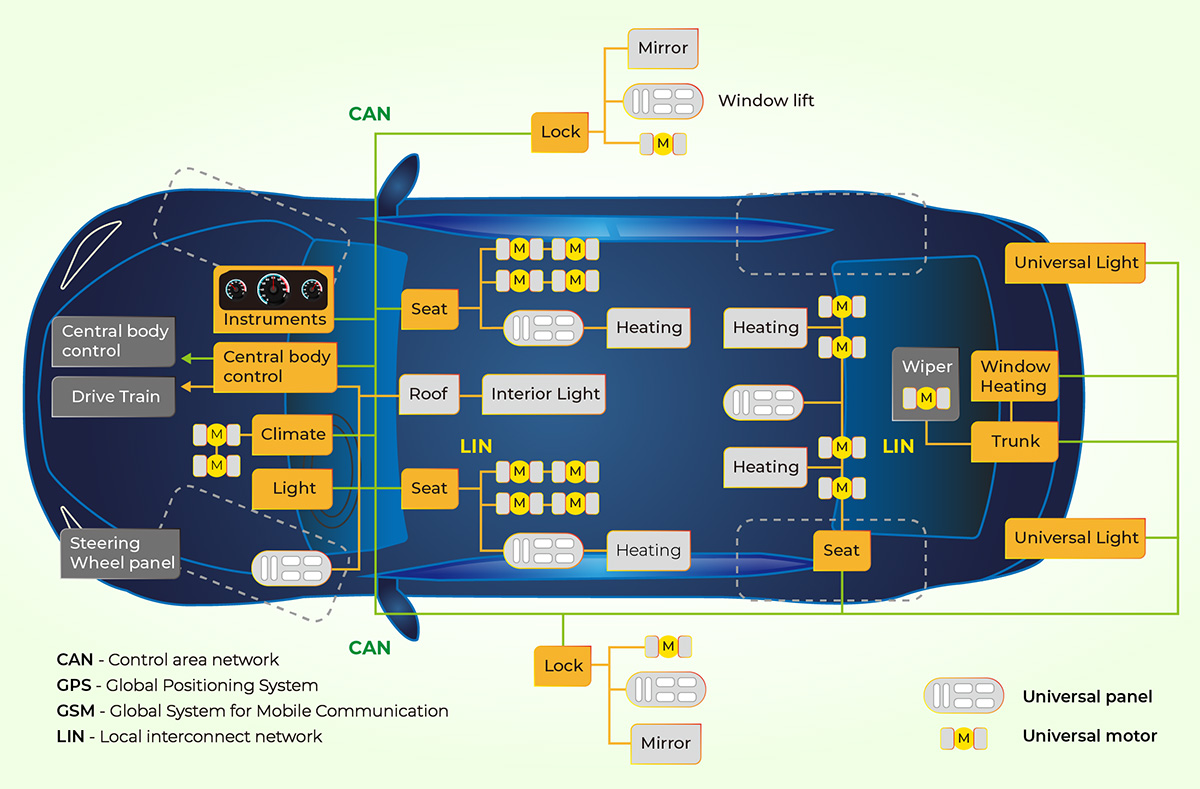
Bazı uygulama örnekleri:
- Otomotiv (araç göstergesi, ABS, OBD-II, vb.).
- Ulaştırma sistemleri (raylı araç, uçak, deniz, vb.).
- Mobil makineler (istifleyici/forklift, inşaat, tarım, vb.).
- Endüstriyel makine kontrol sistemleri (endüstriyel otomasyon, bilgi yönetimi, vb.).
- Ev ve bina otomasyonu (Havalandırma sektörü, asansörler, vb.).
- Tıbbi cihazlar ve laboratuvar otomasyonu.
Kısıtlamalar:
- CANopen, 4 bit işlev kodu ve 7 bit düğüm kimliği ile 11 bitlik CAN ID'si içerir. Böylece, bir veriyolunda 127 adede kadar düğüm için benzersiz adresler kullanılabilir.
- J1939'da maksimum 255 düğüm kimliğine eşit olan 8 bitlik bir cihaz adresi vardır. 255 adresi yayın için kullanılır ve 254 adresi ağ yönetimi için ayrılmıştır. Böylece, bir veriyolundaki 253 düğüm için benzersiz adresler kullanılabilir.
- İletişim bant genişliği iletim mesafesine göre düşük ve yüksek hızlıdır.