Préface
Winstar continue de fournir à ses clients des services avec des solutions complètes, et a activement lancé ses produits de la série écran intelligent en conséquence. Le premier écran intelligent de la série CAN est basé sur ce point de départ. Qu'est-ce que le bus CAN ? Comment marche-t-il ? Quels sont les avantages qu'il peut apporter aux utilisateurs ? Nous vous invitons à lire les informations suivantes.
Introduction
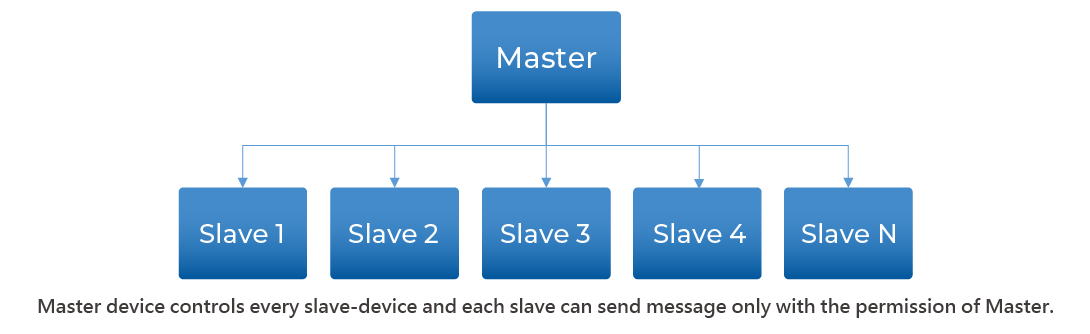
CAN (Controller Area Network) est une norme de bus automobile riche en fonctionnalités. Elle est conçu pour permettre aux ECU (Electronic Control Unit - Unité de contrôle électronique) du réseau de communiquer entre eux sans avoir besoin d'un hôte, contrairement à l'interface RS485, qui doit avoir un hôte (maître) comme extrémité de contrôle ; CAN fournit des applications de communication meilleures et flexibles, qui ne nécessitent pas de contrôle par un hôte.
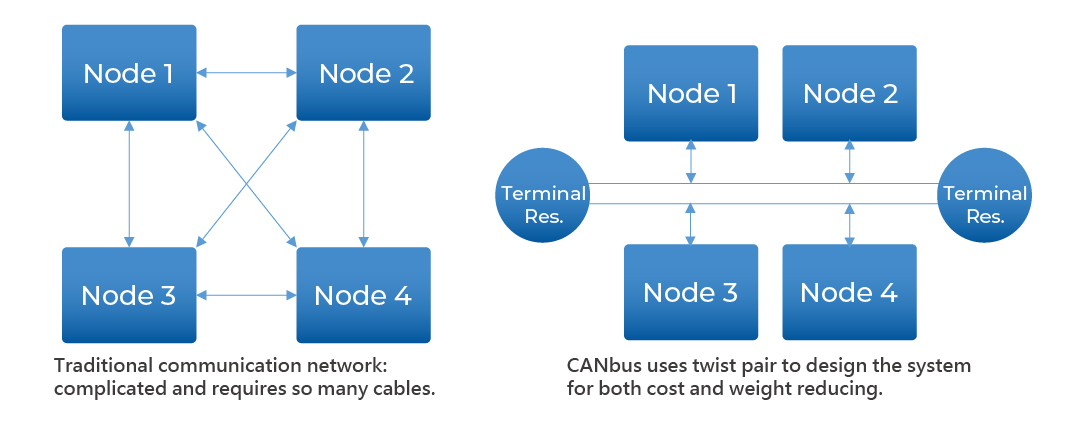
Topologie du système RS485
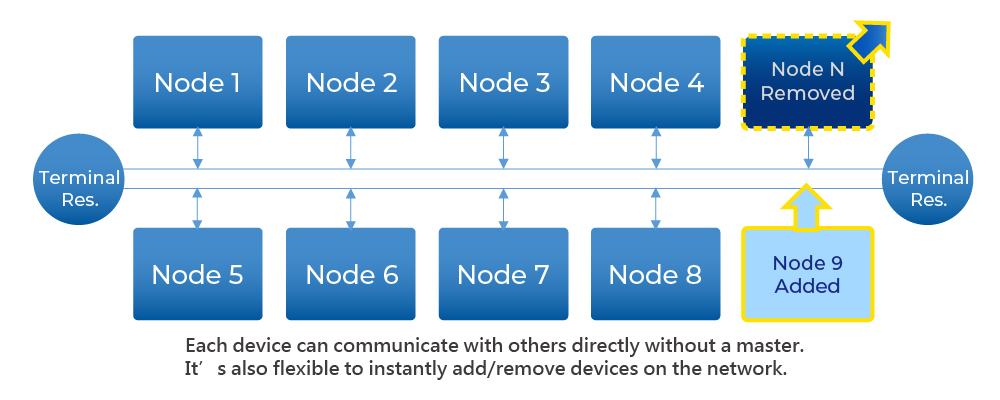
Topologie du système de bus CAN
CAN est un mécanisme de communication par diffusion basé sur un protocole de message. En fonction du contenu des informations, il utilise l'identificateur de message (chaque identificateur est unique dans tout le réseau) pour définir l'ordre de priorité des messages à livrer plutôt que d'attribuer une adresse de station spécifique (ID de nœud).
Par conséquent, CAN possède de bonnes capacités d'ajustement flexible, et peut ajouter des nœuds au réseau existant sans besoin d’effectuer des ajustements au niveau du logiciel et du matériel. En outre, la transmission des messages n'est pas basée sur des types de nœuds particuliers, ce qui augmente la simplicitié de la mise à niveau du réseau.
Les applications de bus CAN peuvent satisfaire complètement la demande de fiabilité et de temps réel des communications de données. C'est la raison pour laquelle l'application du bus CAN s'est étendue aux applications industrielles, médicales et d’autres.
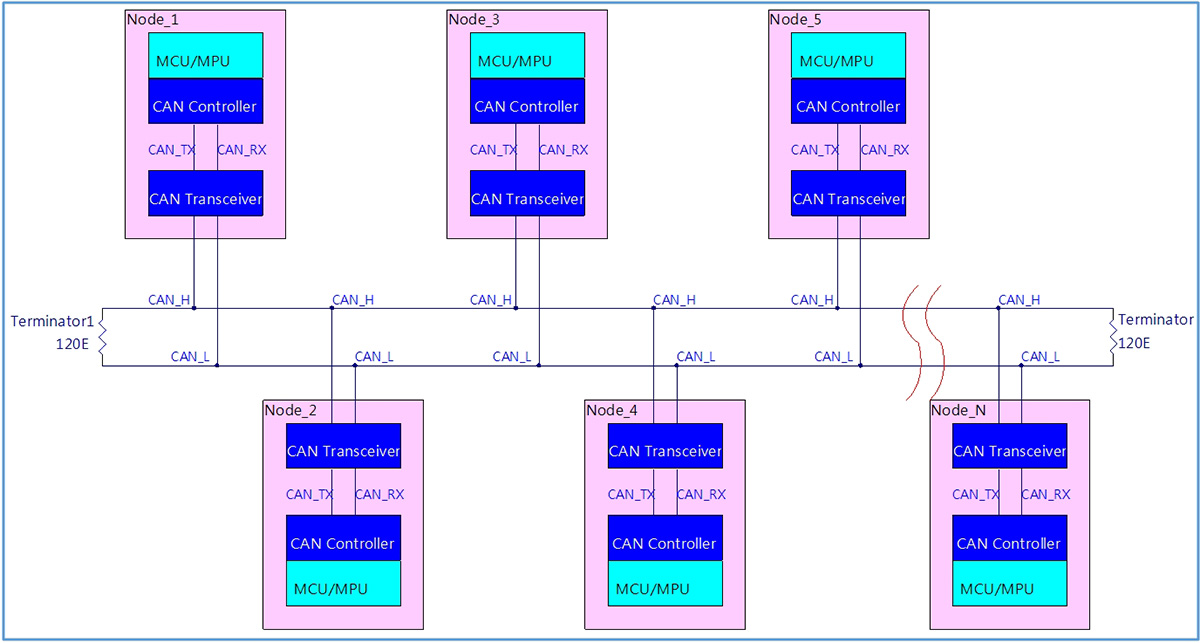
Topology figure (Sub-Block):
Histoire
BOSCH a développé le bus CAN en 1983. CAN a été officiellement annoncé lors de la réunion de la Société internationale des ingénieurs automobiles (SAE) qui s'est passé à Détroit, Michigan, USA en 1986. Le premier contrôleur CAN a été produit par Intel et Philips et a été commercialisé en 1987. La première voiture au monde équipée d'un système multiligne basé sur CAN a été la Mercedes-Benz W140 lancée en 1991.
BOSCH a publié plusieurs versions de la spécification CAN. CAN 2.0 a été publié en 1991. La spécification est divisée en deux parties : la partie A (CAN 2.0A) s'applique au format standard utilisant des codes d'identification de 11 bits, et la partie B (CAN 2.0B) s'applique au format étendu utilisant des codes d'identification de 29 bits.
En 1993, l'Organisation internationale de normalisation (ISO) a publié la norme CAN ISO11898. La norme CAN a ensuite été recompilée en deux parties : ISO11898-1 couvrant la couche de liaison de données ; ISO11898-2 couvrant la couche physique du bus CAN à grande vitesse ; ISO11898-3 a ensuite été annoncée plus tard et couvrait la couche physique du bus CAN à faible vitesse et la spécification de tolérance aux pannes du bus CAN. Les normes ISO11898-2 et ISO11898-3 relatives à la couche physique ne sont pas incluses dans la spécification CAN2.0 de BOSCH. Elles peuvent être achetées séparément auprès de ISO.
En 2012, BOSCH a annoncé CAN_FD 1.0, ou CAN à débit de données variable. Cette spécification utilise une architecture différente, permettant, après arbitrage, de passer à un débit binaire plus rapide et de transmettre différentes longueurs de données. CAN FD est compatible avec le réseau CAN 2.0 actuel, de sorte que le nouveau dispositif CAN FD peut coexister avec le dispositif CAN existant sur le même réseau de contrôle.
Toutes les voitures et camionnettes vendues aux États-Unis après 1996 devaient être conformes aux normes OBD-II (On Board Diagnostics). Dans l'Union européenne, les véhicules à essence vendus après 2001 et les véhicules au diesel vendus après 2004 devaient obligatoirement être conformes aux normes EOBD (European On Board Diagnostics). En 2008, tous les véhicules vendus aux États-Unis devaient implémenter CAN comme l'un de leurs protocoles de signalisation.
Caractéristiques matérielles:
Tous les nœuds sont reliés entre eux par deux fils. Les deux fils forment une paire torsadée et sont connectés avec une impédance caractéristique de 120Ω.
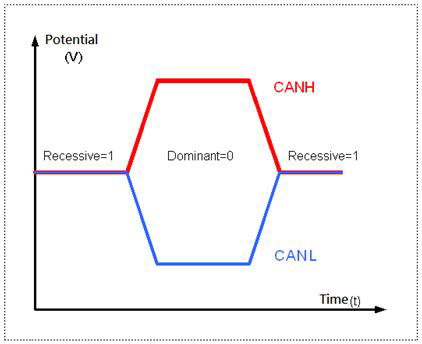
Lorsque le bus CAN transmet un signal dominant (0), il élève la borne CAN_H à un niveau élevé et tire CAN_L à un niveau bas. Lorsque le signal récessif (1) est transmis, la borne CAN_H ou CAN_L ne sera pas contrôlée. Le signal dominant CAN_H et CAN_L ont une tension différentielle nominale de 2V.
Aspect du signal de la couche physique:
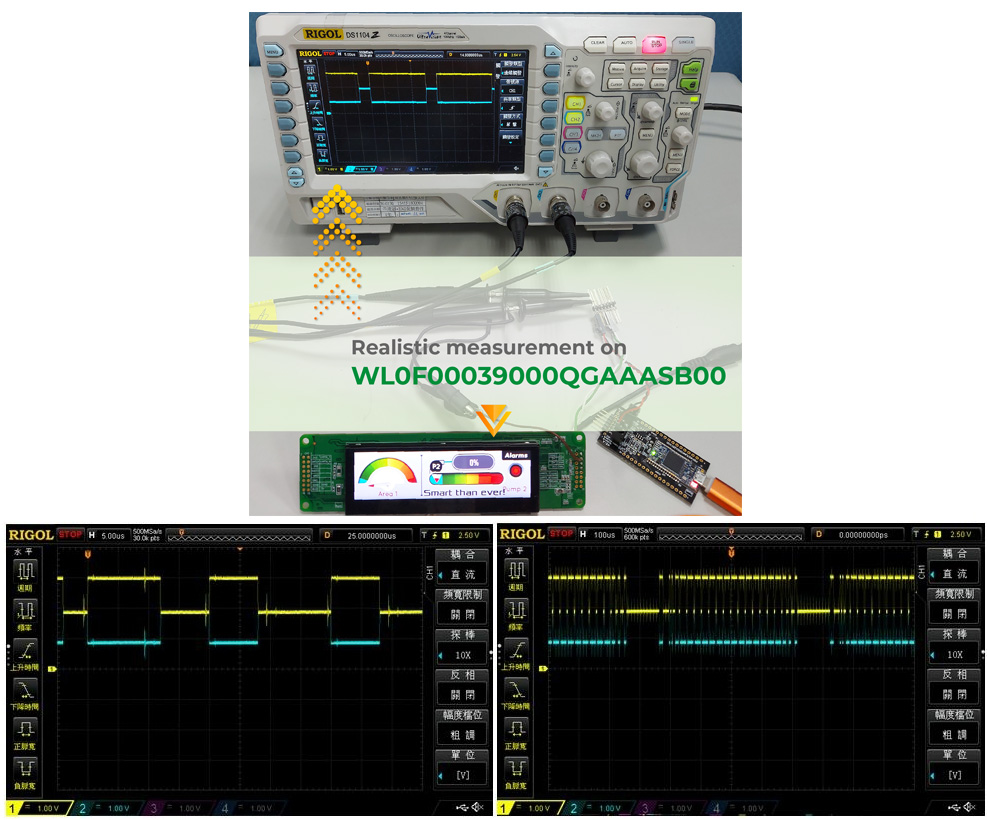
Mesure réaliste sur WL0F00039000QGAAASB00 CAN_H/CAN_L:
Caractéristiques du firmware:
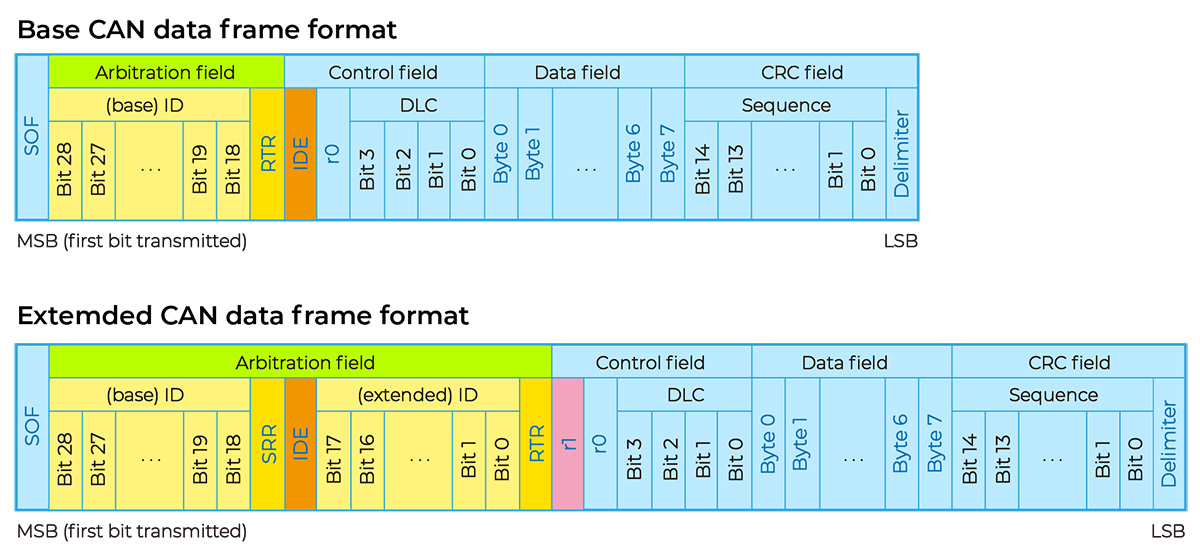
Chaque nœud peut envoyer et recevoir des informations, mais pas en même temps. Un message ou une trame contient principalement un code d'identification (ID), qui indique la priorité des informations, avec jusqu'à huit octets de données. CRC, ACK et d'autres parties de l’image font également partie du message.
Si un nœud transmet un bit dominant (0) et qu'un autre nœud transmet un bit récessif (1), il y aura un conflit sur le bus, et le résultat final sera que le bit dominant "gagne". Cela signifie qu'il n'y a pas de délai dans les informations de priorité supérieure. Les informations du nœud avec une priorité inférieure seront automatiquement transmises à la fin du bit dominant, et la retransmission est tentée après 6 bits d'horloge. Cela fait de CAN un système de communication à priorité instantanée.
La tension exacte d'un 0 ou 1 logique dépend de la couche physique utilisée, mais le principe de base de CAN exige que chaque nœud surveille les données sur le réseau CAN, y compris le nœud émetteur lui-même. Si tous les nœuds transmettent un signal logique 1 en même temps, tous les nœuds verront ce signal logique 1, y compris le nœud émetteur et le nœud récepteur. Si tous les nœuds émetteurs transmettent un signal logique 0 en même temps, tous les nœuds verront ce signal logique 0. Lorsqu'un ou plusieurs nœuds émetteurs transmettent un signal logique 0, mais qu'un ou plusieurs nœuds émetteurs transmettent un signal logique 1, tous les nœuds, y compris le nœud qui transmet un signal logique 1, verront également le signal logique 0. Lorsqu'un noeud transmet un signal logique 1 mais voit un signal logique 0, il réalise qu'il y a un conflit sur la ligne et se déconnecte. Grâce à ce processus, chaque nœud qui transmet un signal logique 1 se déconnecte ou perd l'arbitrage lorsque d'autres nœuds transmettent un signal logique 0. Le nœud qui perd l'arbitrage réintroduira l'information dans la file d'attente plus tard, et le flux binaire de l’image CAN continuera sans défaillance jusqu'à ce qu'il n'y ait plus qu'un seul nœud émetteur. Cela signifie que le nœud qui transmet le premier 1 logique perd l'arbitrage. Étant donné que tous les nœuds transmettent un code d'identification de 11 bits (ou de 29 bits avec CAN 2.0B) au début d'une image CAN, le nœud émetteur avec le code d'identification le plus bas aura plus de 0 au début. Ce nœud gagne l'arbitrage et aura la plus haute priorité.
Format des données CAN2.0A/B:
Apparence des données de trafic du bus CAN:
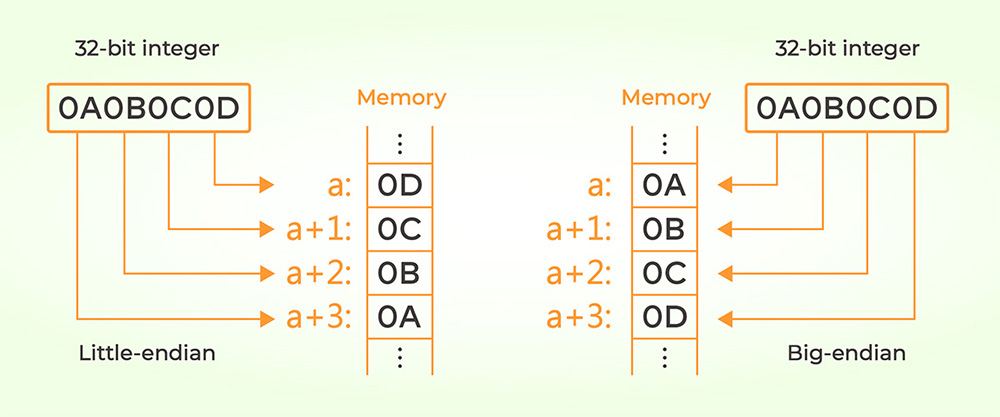
Séquences de données dans la charge utile:
Conclusions:
5 avantages que nous avons basés sur les caractéristiques du bus CAN.
- Faible coût: Les ECU (Electronic Control Units - Unités de contrôle électronique) communiquent via une seule interface CAN, le bus CAN offre une réduction des problèmes, un poids léger et un faible coût.
- Centralisé: Le système de bus CAN permet un diagnostic d'erreur centralisé (par ex. OBD-II) et la configuration de toutes les ECU.
- Robuste: La couche physique du système est robuste face aux défaillances des sous-systèmes et à EMC (compatibilité électromagnétique).
- Efficace: Les messages CAN sont hiérarchisés et utilisent l'arbitrage par bit via des ID afin que les ID les plus prioritaires ne soient pas interrompus.
- Flexible: Chaque ECU contient une puce qui reçoit tous les messages transmis, décide de leur pertinence et agit en conséquence, ce qui permet de modifier et d'inclure facilement des nœuds supplémentaires.
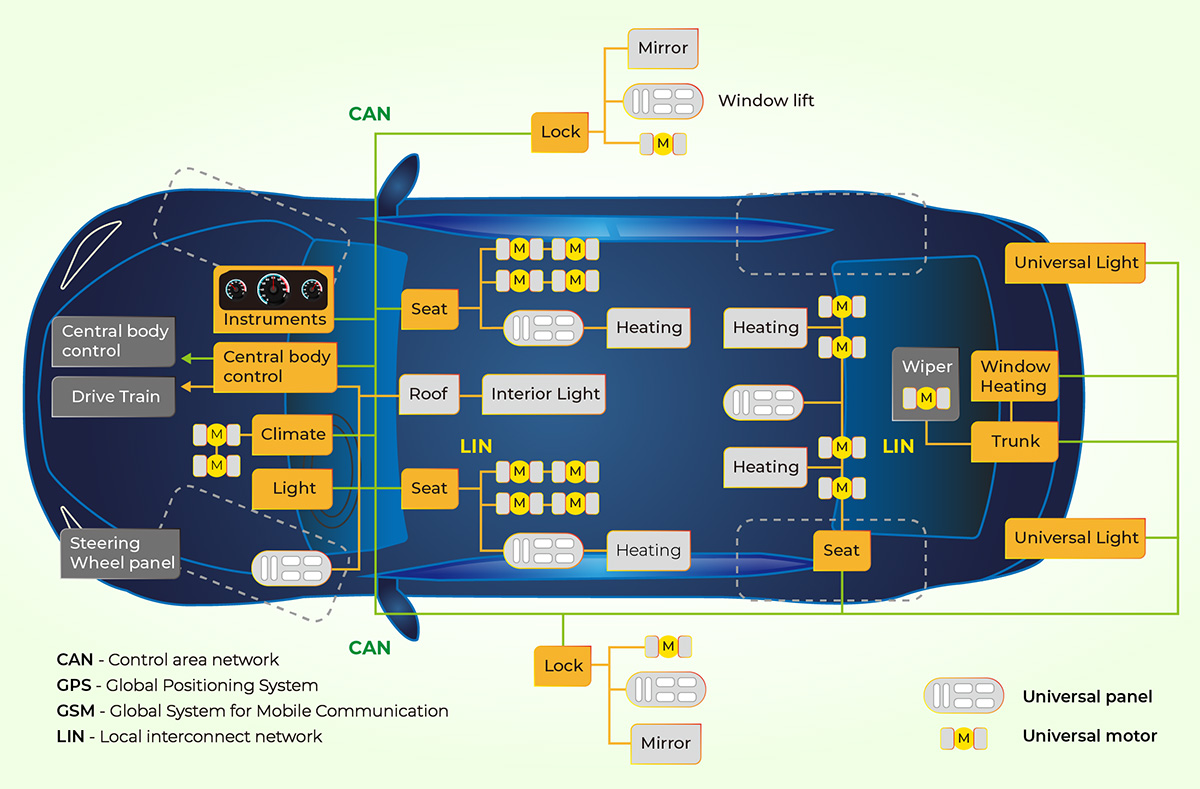
Quelques exemples d'applications:
- Automobile (instrumentation du véhicule, ABS, OBD-II, etc.).
- Systèmes de transport (véhicules ferroviaires, avions, bateaux, etc.).
- Machines mobiles (gerbeurs/chariots élévateurs, construction, agriculture, etc.)
- Systèmes de contrôle des machines industrielles (automatisation industrielle, gestion de l'information, etc.).
- Automatisation à la maison et dans les bâtiments (HVAC, ascenseurs, etc.).
- Dispositifs médicaux et automatisation des laboratoires.
Contraintes:
- CANopen, il y a 11 bits d’ID CAN avec 4 bits de code de fonction et 7 bits d'ID de nœud. Les adresses uniques disponibles sont jusqu’à 127 nœuds sur un bus.
- Dans J1939, il y a une adresse de dispositif de 8 bits qui est égale à 255 ID de nœud au maximum. L'adresse 255 est utilisée pour la diffusion et l’adresse 254 est réservée pour la gestion du réseau. Les adresses uniques disponibles sont donc 253 nœuds sur un bus.
- La largeur de bande de communication est faible et la vitesse élevée par rapport à la distance de transmission.