Prólogo
Winstar continúa proporcionando a los clientes un servicio de solución integral, y por lo tanto, activamente lanzó nuestros productos de la serie de pantallas inteligentes. La primera pantalla inteligente de la serie CAN lanzada está basada en ésta como un punto de comienzo. ¿Qué es el Bus CAN? ¿Cómo funciona? ¿Qué tipo de ventajas puede ofrecer a los usuarios? Leamos más información a continuación.
Introducción
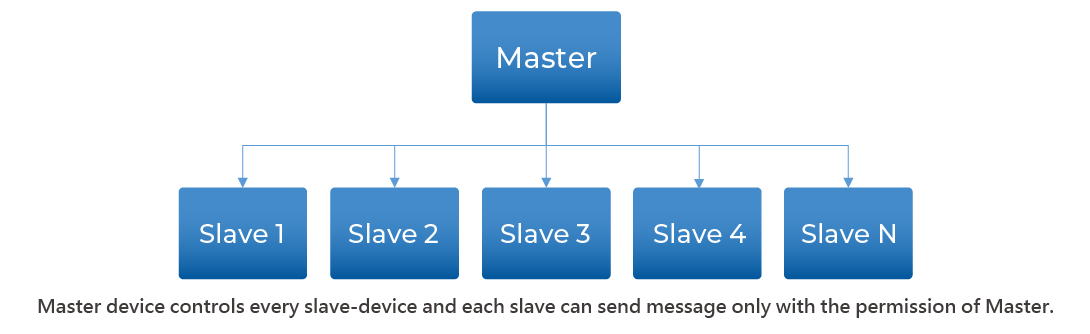
CAN (Red de área de controlador) es un estándar de bus automotriz con unas características excepcionales. Está diseñada para permitir que las ECUs (unidad de control electrónica) en la red se comuniquen entre sí sin la necesidad de un host, a diferencia de la interfaz RS485. Básicamente debe disponer de un host (Maestro) como control final; pero el CAN proporciona unas aplicaciones de comunicación flexibles y mejores, las cuales no requieren el control de un host.
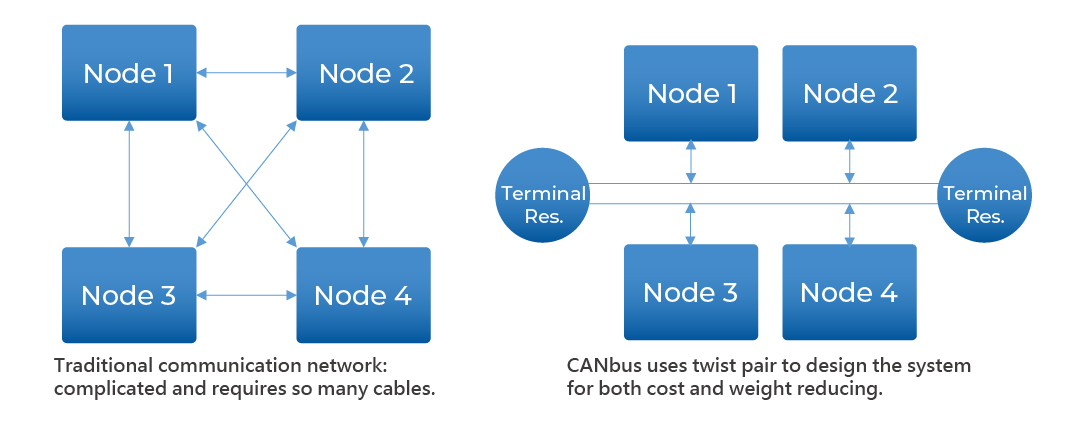
Topología del sistema RS485
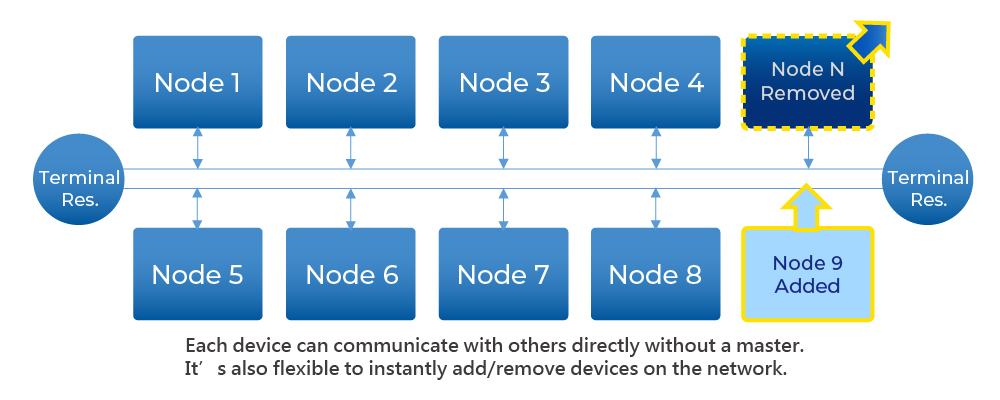
Topología del sistema Bus CAN
CAN es un Mecanismo de Comunicación de Difusión basado en el protocolo orientado a mensajes. De acuerdo con el contenido de la información, utiliza un identificador de mensaje (cada identificador es único en la red completa) para definir el orden de prioridad de los mensajes para su entrega, en vez de asignar una dirección de estación específica (ID del nodo).
Por lo tanto, CAN tiene unas capacidades de ajuste buenas y flexibles, y pueden añadir nodos a la red existente sin realizar ajustes en el software y el hardware. Además, la transmisión de mensajes no está basada en un tipo especial de nodos, lo que aumenta la comodidad de mejora de la red.
La aplicación de bus CAN puede satisfacer completamente las necesidades de fiabilidad y tiempo real de la comunicación de solicitud de datos. Ésta es la razón por la que la aplicación Bus CAN está destinada a aplicaciones médicas e industriales entre otras.
Topology figure (Sub-Block):
Historia
BOSCH desarrolla el bus CAN en 1983. CAN fue oficialmente anunciada en el encuentro de la Sociedad Internacional de Ingenieros Automotrices (SAE) celebrado en Detroit, Michigan, en los Estados Unidos en 1986. El primer controlador CAN fue producido por Intel y Philips y lanzado en 1987. El primer coche del mundo equipado con un sistema multilínea basado en CAN fue la Mercedes Benz W140, lanzado en 1991.
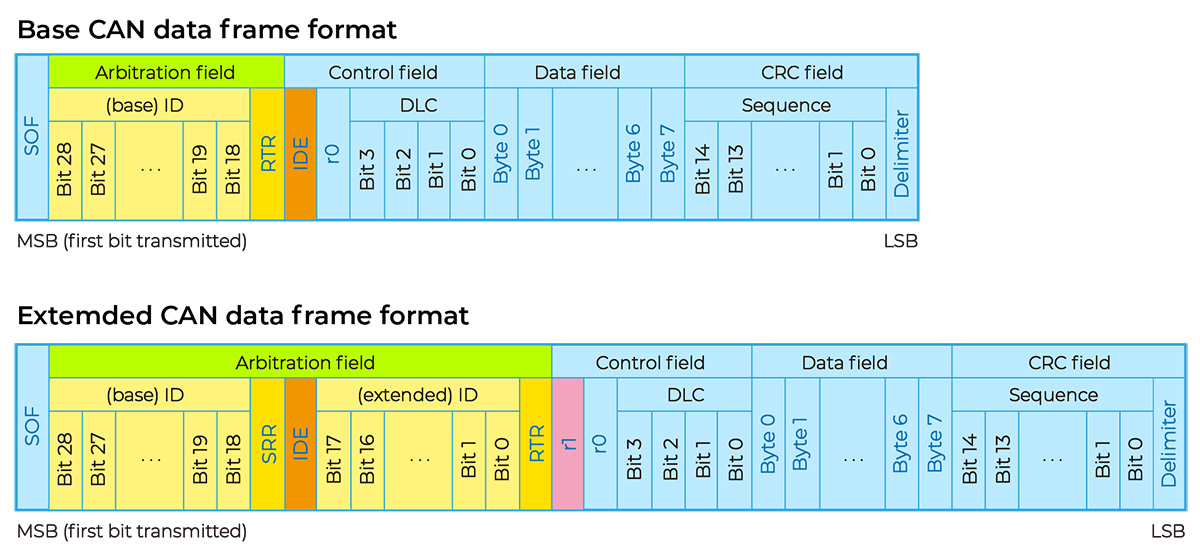
BOSCH ha publicado varias versiones de la especificación CAN. CAN 2.0 fue lanzada en 1991. La especificación está divida en dos partes; La Parte A (CAN 2.0A) aplicada al formato estándar utilizando códigos de identificación de 11 bits, y la Parte B (CAN 2.0B) aplicada a formato extendido, utilizando identificadores de 29-bits.
En 1993, la Organización Internacional de Normalización (ISO) publicó la norma ISO11898 CAN. Más tarde, la norma CAN fue recopilada en dos partes: ISO11898-1 cubre el nivel de enlace de datos; ISO 11898-2 cubre el nivel físico de la alta velocidad del bus CAN; ISO 11898-3 fue anunciado más tarde y cubre las especificaciones de tolerancia de fallos del bus CAN y los niveles físicos del bus CAN de baja velocidad. Las normas de nivel físico ISO11898-2 e ISO11898-3 no están incluidas en las especificaciones BOSCH CAN2.0. Puede adquirirse por separado de ISO.
En 2012, BOSCH anunció la CAN_FD 1.0, o CAN con velocidad de datos variable. Esta especificación utiliza una arquitectura diferente, permitiendo después del arbitraje conmutar a una tasa de bits más rápida y transmitir diferentes longitudes de datos. CAN FD es compatible con la existente red CAN 2.0, así que el nuevo dispositivo CAN FD puede coexistir con el dispositivo CAN existente en la misma red de control.
Después de 1996, todos los coches y camiones ligeros vendidos en los Estados Unidos estaban obligados a cumplir con la norma OBD-II (Diagnóstico a bordo). En la Unión Europea, los vehículos de gasolina vendidos después de 2001 y los vehículos diésel vendidos después de 2004 estaban obligados a cumplir con la norma EOBD (Diagnóstico a bordo Europeo). En 2008 todos los vehículos vendidos en los EEUU estaban obligados a implementar CAN como uno de sus protocolos de señalización.
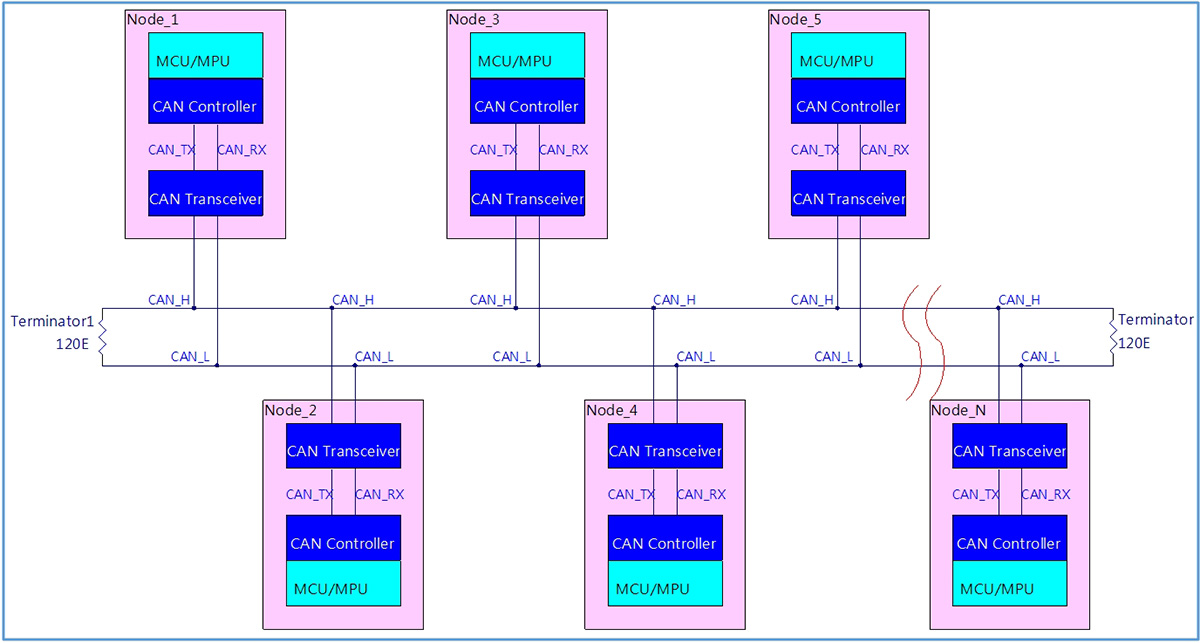
Características del hardware:
Todos los nodos se conectan juntos por medio de dos cables. Los dos cables forman un par trenzado y están conectados con una impedancia característica de 120 Ω.
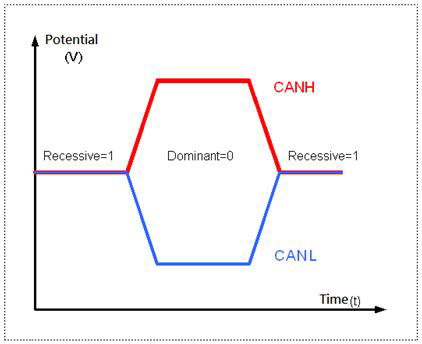
Cuando el bus CAN transmite una señal dominante (0), eleva el terminal CAN_H a un alto nivel y arrastra la CAN_L a un nivel bajo. Cuando la señal recesiva (1) está transmitiendo, el terminal CAN_H o el terminal CAN_L no se ajustará. La señal dominante CAN_H y la CAN_L tienen una tensión diferencial nominal de 2 V.
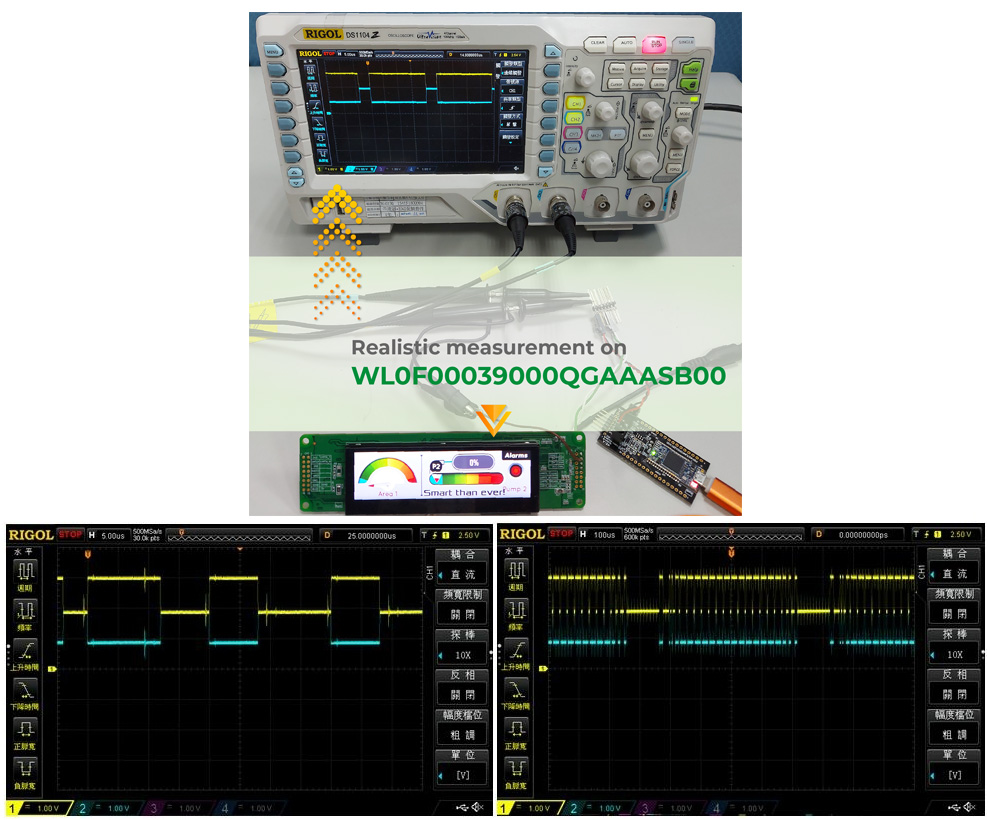
Pérdida de señal de nivel físico:
Medición realista en WL0F00039000QGAAASB00 CAN_H/CAN_L:
Características de firmware:
Cada nodo puede enviar y recibir información, pero no al mismo tiempo. Un mensaje o fotograma incluye principalmente un código de identificación (ID) que indica la prioridad de la información, hasta ocho bytes de datos. CRC, ACK y otras partes de los fotogramas forman parte también del mensaje.
Si un nodo transmite un bit dominante (0) y otro nodo transmite un bit recesivo (1), entonces hay un conflicto en el bus, y el resultado final es que el bit dominante "gana." Esto significa que no hay retardo en la información de mayor prioridad. La información del nodo con prioridad menor es transmitida automáticamente al final del bit dominante, y la retransmisión se intenta después de 6 bits de reloj. Esto hace a CAN la más adecuada como un sistema de comunicación prioritario instantáneo.
El voltaje exacto de un lógico 0 o 1 depende del nivel físico utilizado, pero el principio básico de CAN requiere cada nodo para controlar los datos en la red CAN, incluyendo el nodo mismo enviado. Si todos los nodos están transmitiendo en lógico 1 al mismo tiempo, todos los nodos verán esta señal lógica 1, incluyendo el nodo enviado y el nodo recibido. Si todos los nodos enviados transmiten una señal lógica 0 al mismo tiempo, entonces todos los nodos verán esta señal lógica 0. Cuando uno o más nodos enviados transmiten una señal lógica 0, pero uno o más nodos enviados transmiten una señal lógica 1, todos los nodos, incluyendo el nodo que transmite una señal lógica 1, verán también la señal lógica 0. Cuando un nodo transmite una señal lógica 1 pero ve una señal lógica 0, se dará cuenta de que hay una disputa en la línea y cierre sesión. A través de este proceso, cualquier nodo que transmite lógica 1 cierran sesión o pierden arbitraje cuando otros nodos transmiten lógica 0. El nodo que pierde el arbitraje volverá a añadir la información a la cola después, y el flujo de bit del fotograma de la CAN continuará sin fallos hasta que haya un solo nodo enviado. Esto significa que el nodo que transmite el primer lógico 1 pierde arbitraje. Ya que todos los nodos transmiten en 11 bits (o en 29 bits en CAN 2.0B) el código de identificación cuando comienza un fotograma CAN, el nodo enviado con el código de identificación menor tiene más de 0 s al principio. Este nodo gana el arbitraje y tiene mayor prioridad.
CAN2.0A/B Formato de datos:
Bus CAN información de tráfico de datos:
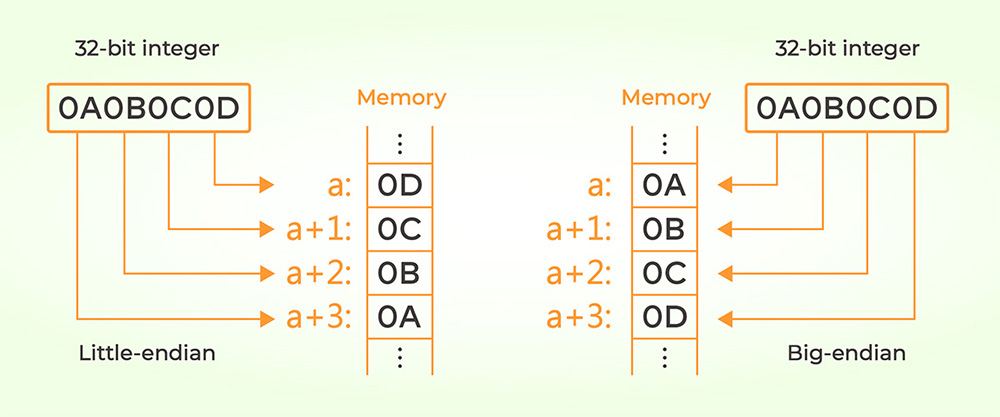
Secuencia de datos de carga:
Conclusione:
5 beneficios que tenemos gracias a las características de bus CAN.
- Bajo Coste: ECUs (Unidades de Control Electrónico) comunican a través de una interfaz CAN única, el bus CAN reduce el número de problemas, su peso ligero y bajo coste.
- Centralizado: El sistema bus CAN permite el diagnóstico de fallos de la central (ex. OBD-II) y configuración en todo el ECU.
- Robusto: El nivel físico del sistema es robusto en cuanto al fallo del subsistemas y del EMC (compatibilidad electromagnética).
- Eficiente: Los mensajes CAN se priorizan y utilizan arbitraje bit a bit a través de IDs así que la alta prioridad IDs no está interrumpida.
- Flexible: Cada ECU contiene un chip para recibir todos los mensajes transmitidos, decide la relevancia y actúa en consecuencia - lo que permite una modificación fácil y la inclusión de nodos adicionales.
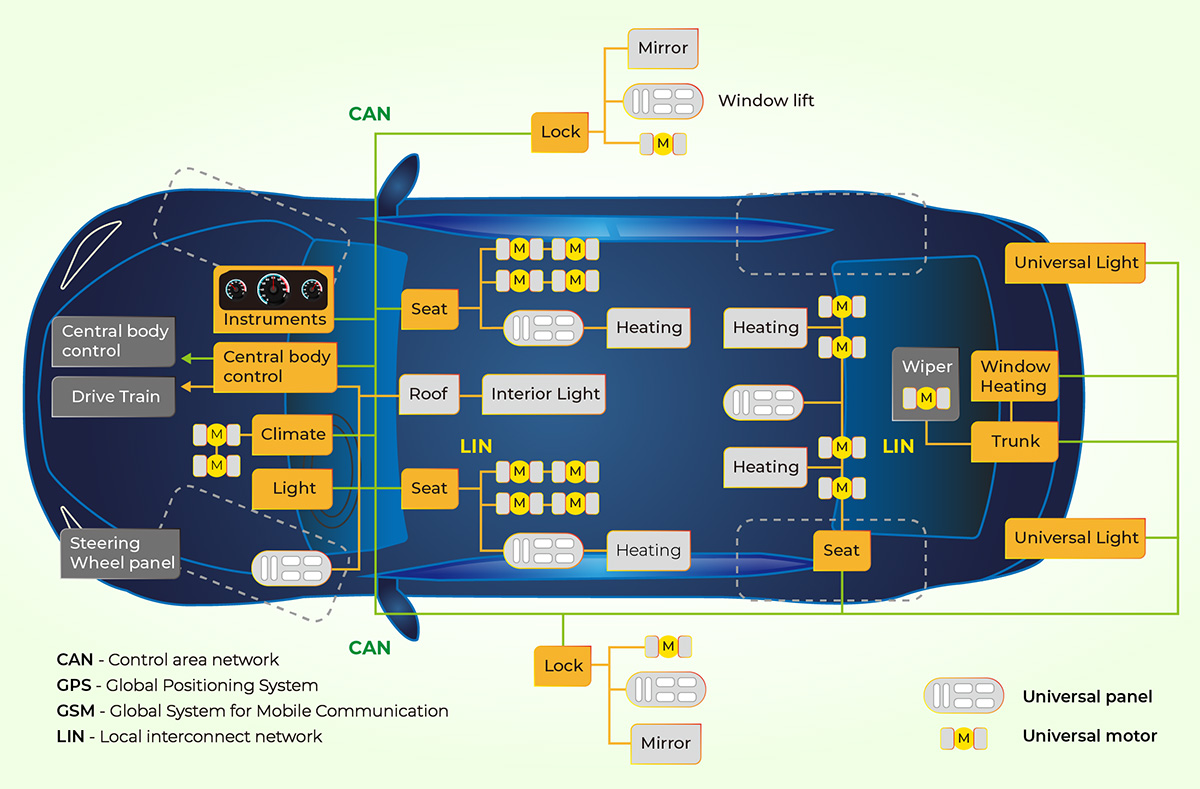
Algunos ejemplos de aplicaciones:
- Automotriz (instrumentos del vehículo, ABS, OBD-II, etc.). Sistemas de transporte (vehículo ferroviario, aviación, marítimo, etc.).
- Maquinaria móvil (apiladora/carretilla, construcción, agricultura, etc.).
- Sistemas de control de maquinaria industrial (automoción industrial, gestión de información, etc.).
- Automatización de construcción y viviendas (climatización, ascensores, etc.).
- Dispositivos médicos y automatización de laboratorio.
Limitaciones:
- CANopen, hay ID CAN de 11 bits con código de función de 4 bits de nodo ID de 7 bits. Así que las únicas direcciones disponibles son de hasta 127 nodos de bus.
- En J1939, hay 8 bits de dirección de dispositivo que es igual a 255 nodos de ID máximo. La dirección 255 es utilizada para difundir y 254 está reservada para la gestión de la red. Así que las únicas direcciones disponibles para 253 nodos de bus.
- La comunicación del ancho de banda es a velocidad alta o baja frente a la distancia de transmisión.