Prefácio
A Winstar continua a fornecer aos clientes um serviço de solução completo e, consequentemente, lançou ativamente os nossos produtos da série Smart Display. O primeiro Smart Display da série CAN lançado se baseia nele, como ponto de partida. O que é CAN Bus? Como ele opera? Que tipo de vantagem pode levar aos usuários? Vamos ler mais informações em seguida.
Introdução
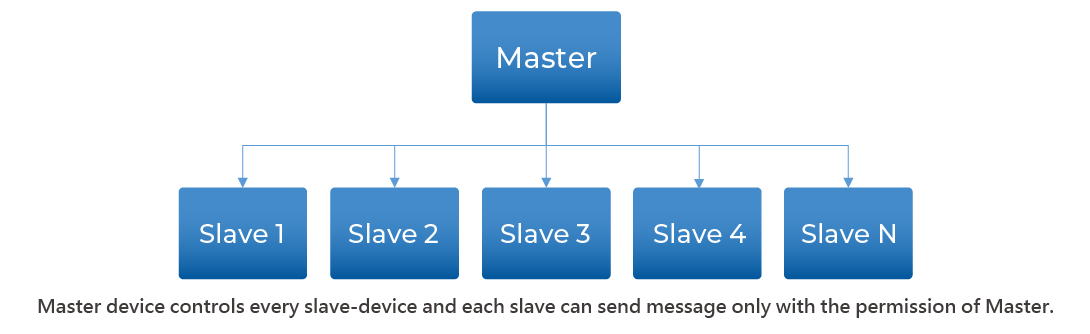
CAN (Rede Área Controlador) é um padrão de bus automotivo rico de funções. É projetado para permitir que as ECUs (Electronic Control Unit) na rede se comuniquem entre si sem a necessidade de um host, diferente da interface RS485, na prática deve existir um host (Master) como extremidade de controle; mas, o CAN fornece aplicações de comunicação melhores e flexíveis que não exigem o controle do host.
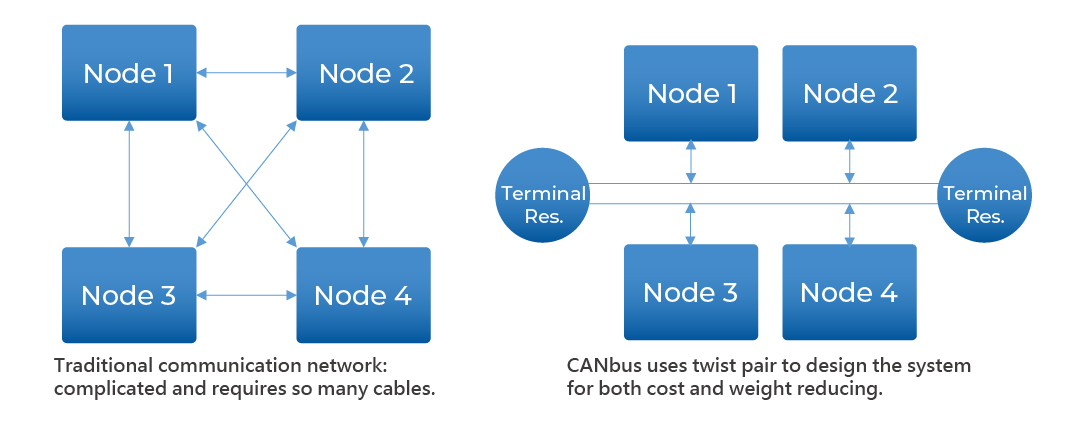
Topologia do Sistema RS485
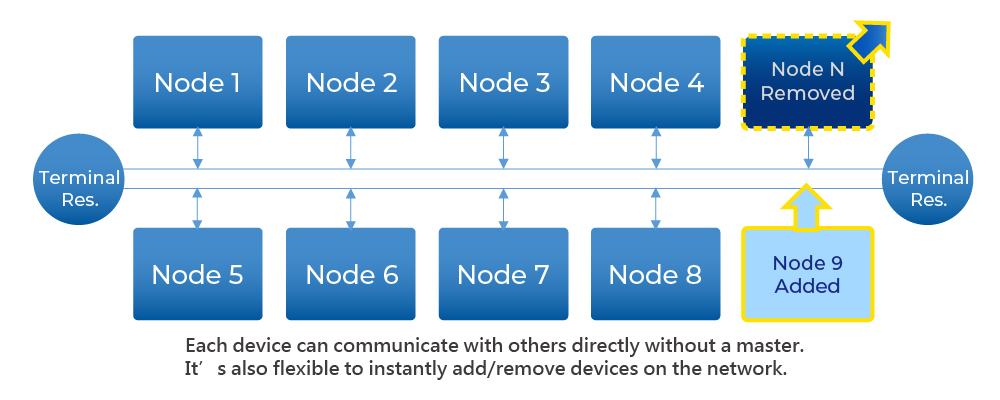
Topologia do Sistema CAN Bus
CAN é um mecanismo de comunicação de transmissão com base no protocolo orientado às mensagens. De acordo com o conteúdo das informações, utiliza Message Identifier (cada identificador é único em toda a rede) para definir a ordem de prioridade das mensagens para a entrega, em vez de atribuir um endereço de estação específica (ID Nó).
Portanto, CAN tem boas capacidades de regulagem flexível e pode adicionar nós à rede existente, sem trazer modificações no software e hardware. E ainda, a transmissão das mensagens não se baseia em tipos especiais de nós, o que aumenta a conveniência da atualização da rede.
As aplicações do CAN bus podem satisfazer completamente a confiabilidade e a solicitação e, tempo real da comunicação de dados. Este é o motivo pelo qual o aplicativo CAN bus foi estendida a aplicações industriais, médicas e de outro tipo.
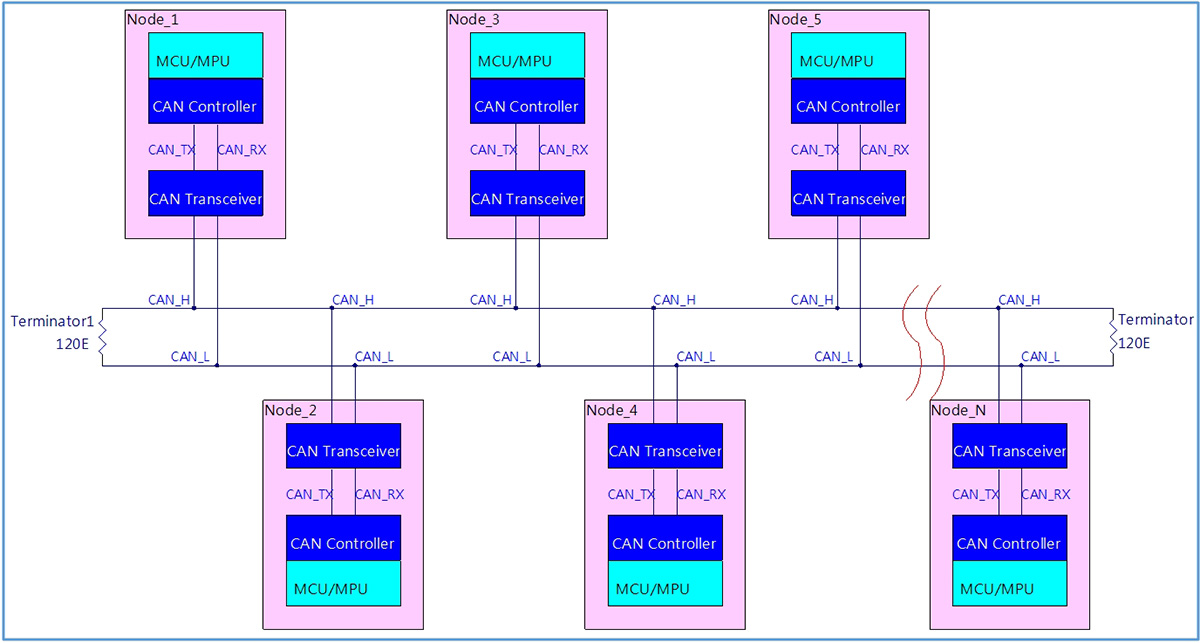
Topology figure (Sub-Block):
História
BOSCH desenvolveu o CAN bus em 1983. CAN foi anunciado oficialmente no encontro da Sociedade Internacional dos Engenheiros Automotivos (SAE) realizado em Detroit, Michigan, EUA em 1986. O primeiro controlador CAN foi produzido pela Intel e Philips e lançado em 1987. O primeiro carro no mundo equipado com um sistema multilinha baseado no CAN foi a Mercedes-Benz W140 lançado em 1991.
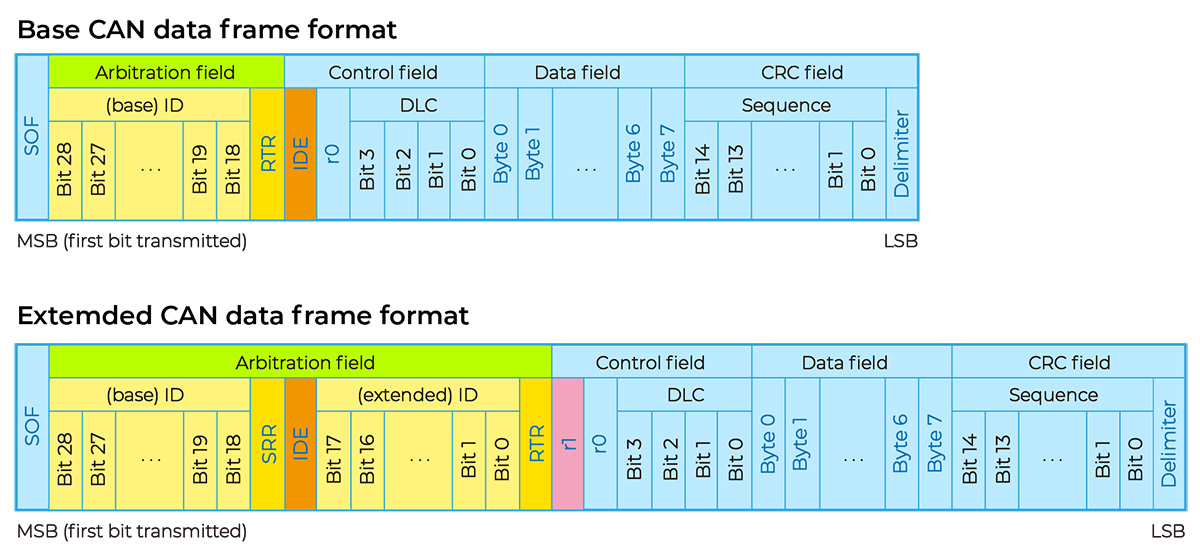
A BOSCH publicou diversas versões das especificações CAN. CAN 2.0 foi lançado em 1991. A especificação é dividida em duas partes; Parte A (CAN 2.0A) se aplica ao formato padrão usando códigos de identificação de 11 bit e a Parte B (CAN 2.0B) se aplica ao formato estendido utilizando identificadores de 29 bits.
Em 1993, a Organização Internacional para a Padronização (ISO) publicou a norma CAN ISO11898. Em seguida, a norma CAN foi recompilada em duas partes: A ISO11898-1 cobriu o nível de vínculos de dados; A ISO11898-2 cobriu o nível físico do CAN bus de alta velocidade; A ISO11898-3 foi anunciada depois e cobriu o nível Físico CAN bus de baixa velocidade e a especificação tolerância de falha CAN bus. As normas de nível físico ISO11898-2 e ISO11898-3 não estão incluídas na especificação BOSCH CAN2.0. Elas podem ser adquiridas separadamente da ISO.
Em 2012, a BOSCH lançou CAN_FD 1.0 ou CAN com taxa de dados variável. Esta especificação usa uma arquitetura diferente, permitindo depois da arbitragem, a passagem para uma taxa de bit mais rápida e a transmissão de diversos comprimentos de dados. CAN FD é compatível com a rede CAN 2.0 existente, de modo que o novo dispositivo CAN FD pode coexistir com o dispositivo CAN existente na mesma rede de controle.
Depois de 1996, todos os caminhões leves vendidos nos Estados Unidos deviam respeitar as normas OBD-II (On Board Diagnostics). Na União Europeia, os veículos a gasolina vendidos depois de 2001 e os veículos a diesel vendidos depois de 2004 devem obrigatoriamente respeitar as normas EOBD (European On Board Diagnostics). Em 2008, todos os veículos vendidos nos Estados Unidos devem implementar CAN, como um dos seus protocolos de sinalização.
Características do Hardware:
Todos os nós são conectados juntos por dois fios. Os dois fios formam um par torcido e são conectados com uma impedância característica de 120Ω.
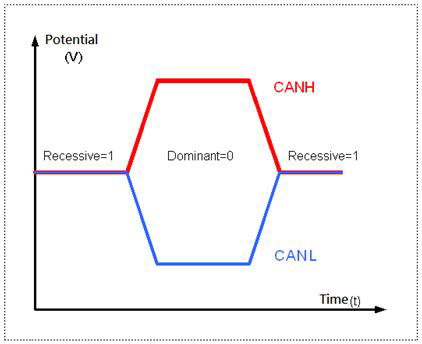
Quando o CAN bus transmite um sinal dominante (0), elevará o terminal CAN_H a um nível alto e levará CAN_L a um nível baixo. Quando é transmitido o sinal recessivo (1), o terminal CAN_H ou CAN_L não será dirigido. O sinal dominante CAN_H e CAN_L tem uma tensão diferencial nominal de 2V.
Aspecto do sinal do nível físico:
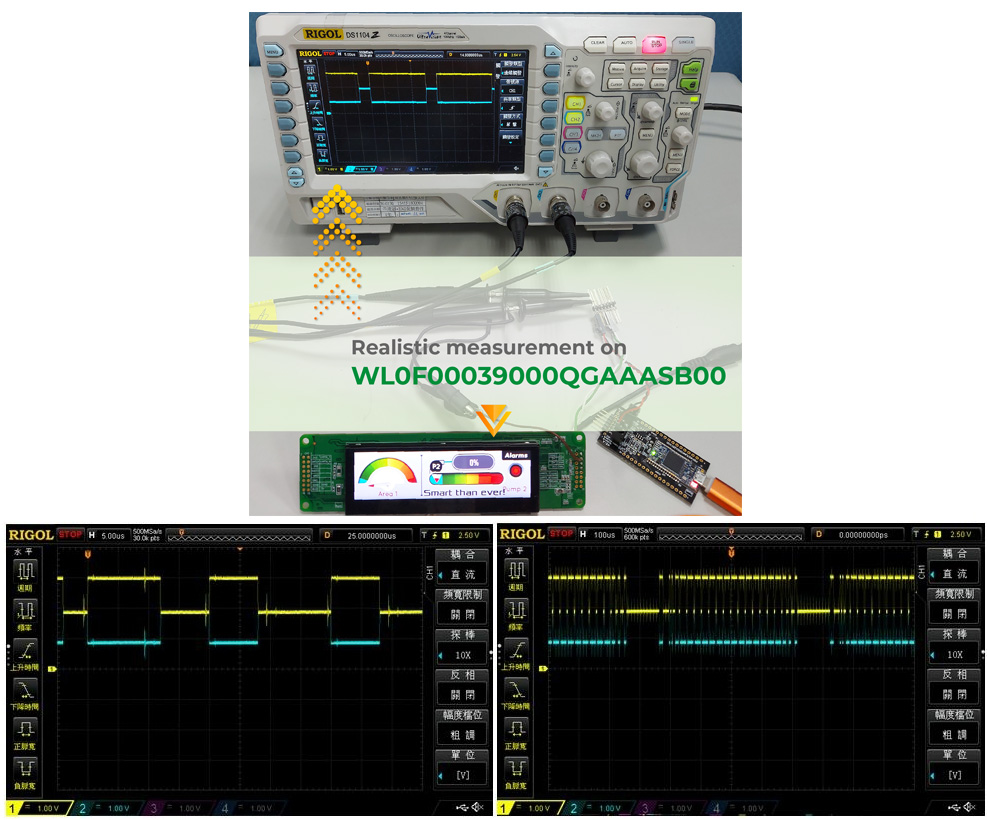
Medição realística em WL0F00039000QGAAASB00 CAN_H/CAN_L:
Características do Firmware:
Cada nó pode enviar e receber informações, mas não ao mesmo tempo. Uma mensagem ou quadro inclui principalmente um código de identificação (ID), que indica a prioridade da informação, até oito bytes de dados. CRC, ACK e outras partes do quadro também fazem parte da mensagem.
Se um nó transmite um bit dominante (0) e outro nó transmite um bit recessivo (1), então existe um conflito no bus e o resultado final é que o bit dominante “vence”. Isto significa que não existe atraso nas informações de prioridade mais elevada. As informações do nó com prioridade inferior são transmitidas no fim do bit dominante e a retransmissão é tentada depois de 6 bits de clock. Isto torna CAN adequada como sistema de comunicação com prioridade instantânea.
A tensão exata de um 0 a 1 lógico depende do nível físico utilizado, mas o princípio de base do CAN exige que cada nó monitore os dados na rede CAN, incluso o nó de envio do mesmo. Se todos os nós transmitem a lógica 1 ao mesmo tempo, todos os nós verão este sinal de lógica 1, incluído o nó emitido e o nó recebedor. Se todos os nós emissores transmitem ao mesmo tempo um sinal lógico 0, então todos os nós verão este sinal lógico 0. Quando um ou mais nós emissores transmitem um sinal lógico 0, mas um ou mais nós emissores transmitem um sinal lógico 1, todos os nós, incluindo o nó que transmite um sinal lógico 1, verá também o sinal lógico 0. Quando um nó transmite um sinal lógico 1, mas vê um sinal lógico 0, ele perceberá que existe uma disputa na linha e se desconectará. Através deste processo, qualquer nó que transmite a lógica 1 é desconectado ou perde a arbitragem, quando outros nós transmitem o 0 lógico. O nó que perde a arbitragem adicionará novamente as informações na fila em um segundo momento e o fluxo de bits do quadro CAN continuará sem erros até que fique apenas um nó emissor. Isto significa que o nó que transmite o primeiro 1 lógico perde a arbitragem. Como todos os nós transmitem um código de identificação de 11-bit (ou 29-bit no CAN 2.0B) quando iniciar um quadro CAN, o nó emissor com o código identificativo mais baixo tem mais 0s no início. Este nó ganha a arbitragem e tem a máxima prioridade.
Formato de dados CAN2.0A/B:
Dados de tráfego de CAN parecem:
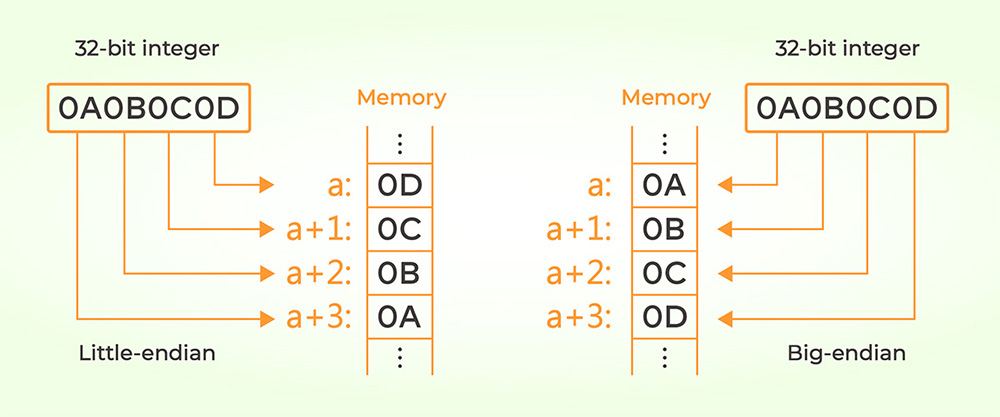
Sequências de dados no payload:
Conclusões:
5 benefícios foram baseados nas características do CAN bus.
- Baixo Custo: As ECUs (Electronic Control Units) se comunicam através de uma interface CAN única, o CAN bus oferece redução dos problemas, leve peso e baixo custo.
- Centralizado: O sistema CAN bus permite o diagnóstico centralizado dos erros (por ex. OBD-II) e configuração em todas as ECUs.
- Robusto: O nível físico do sistema é robusto em relação a falhas dos subsistemas e EMC (electromagnetic compatibility).
- Eficiente: As mensagens CAN são priorizadas e utilizam a arbitragem bit a bit, por meio do ID para que os IDs com prioridade mais alta não sejam interrompidos.
- Flexível: Cada ECU contém um chip para receber todas as mensagens transmitidas, decidir a pertinência e agir de acordo - isto permite uma fácil modificação e a inclusão de nós adicionais
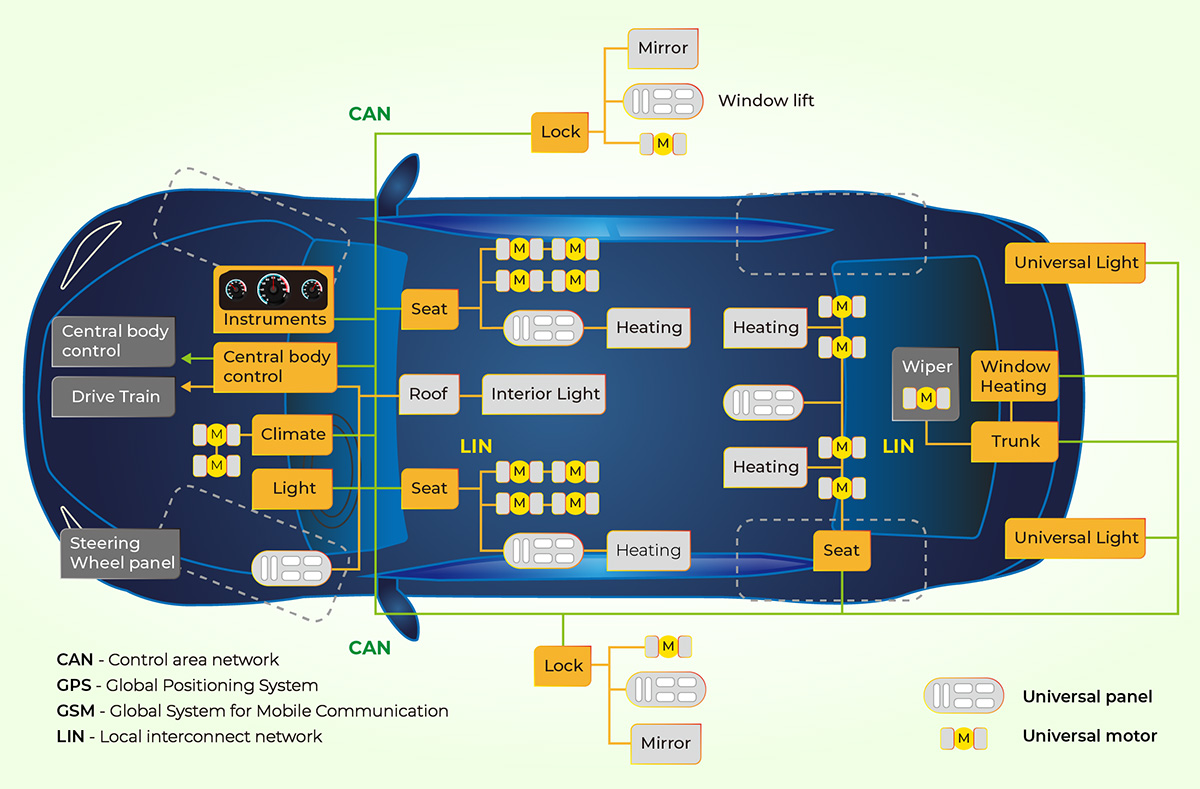
Alguns exemplos de aplicações:
- Automotivo (instrumento do veículo, ABS, OBD-II, etc.).
- Sistemas de transporte (veículo ferroviário, aéreo, marítimo, etc.).
- Maquinarias móveis (empilhadeira/ carregador, construção, agricultura, etc.).
- Sistemas de controle das máquinas industriais (automação industrial, gestão das informações, etc.).
- Domótica e automação predial (HVAC, elevadores, etc.).
- Dispositivos médicos e automação de laboratórios.
Restrições:
- CANopen, existem CAN ID com 11 bits, com código de função de 4 bits e ID nó de 7 bits. Desta forma, os endereços únicos disponíveis para um máximo de 127 nós em um bus.
- Em J1939, existem endereços de dispositivos de 8 bits que equivalem a um ID de nó 255 no máximo. O endereço 255 é usado para a transmissão e o 254 é reservado à gestão da rede. Deste modo, os endereços únicos disponíveis para 253 nós em um bus.
- A largura de banda de comunicação é baixa e alta velocidade, em relação à distância de transmissão.