Prefazione
Winstar continua a fornire ai clienti un servizio di soluzione completo e di conseguenza ha lanciato attivamente i nostri prodotti della serie Smart display. Il primo Smart display della serie CAN lanciato si basa su questo come punto di partenza. Cos'è il CAN bus? Come funziona? Che tipo di vantaggio può portare agli utenti? Leggiamo ulteriori informazioni nel seguito.
Introduzione
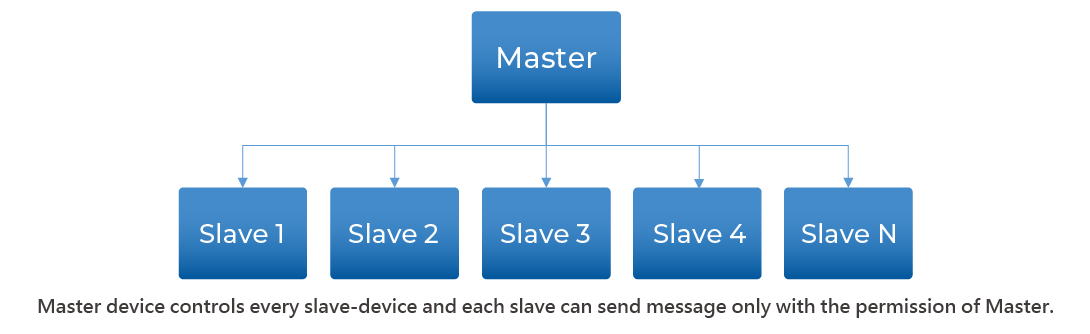
CAN (Controller Area Network) è uno standard di bus automobilistico ricco di funzionalità. È progettato per consentire alle ECU (centraline elettroniche) sulla rete di comunicare tra loro senza la necessità di un host, a differenza dell'interfaccia RS485. In pratica, deve avere un host (Master) come estremità di controllo; ma il CAN fornisce applicazioni di comunicazione migliori e flessibili, che non richiedono il controllo dell'host.
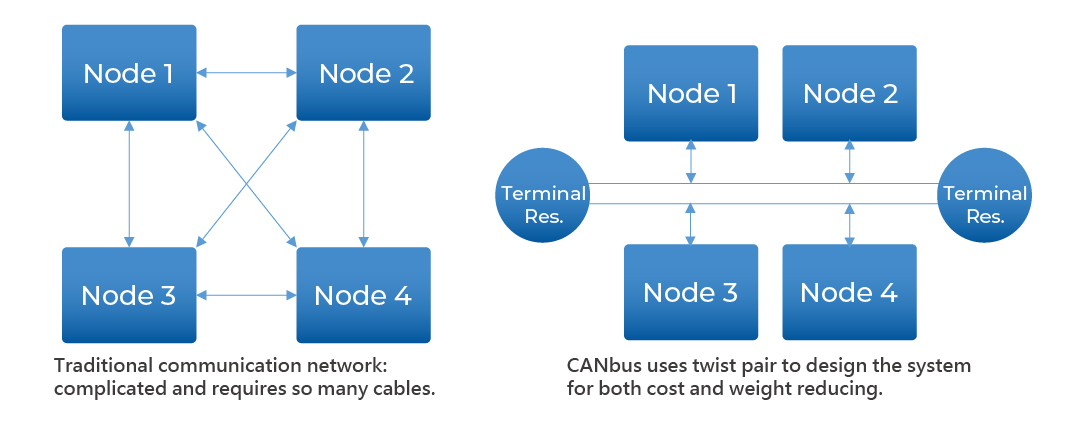
Topologia di sistema RS485
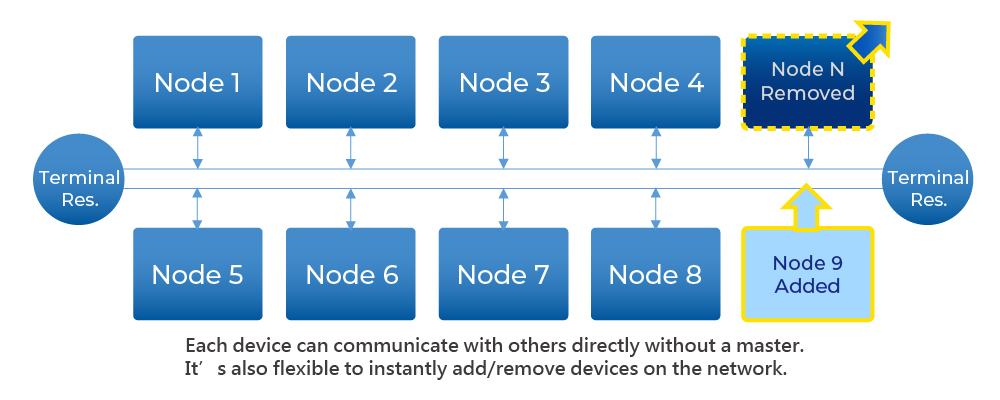
Topologia di sistema CAN bus
CAN è un meccanismo di comunicazione broadcast basato sul protocollo orientato ai messaggi. In base al contenuto delle informazioni, utilizza Message Identifier (ogni identificatore è univoco nell'intera rete) per definire l'ordine di priorità dei messaggi per la consegna, piuttosto che assegnare un indirizzo di stazione specifico (ID nodo).
Pertanto, CAN ha buone capacità di regolazione flessibile e può aggiungere nodi alla rete esistente senza apportare modifiche a software e hardware. Inoltre, la trasmissione dei messaggi non si basa su tipi speciali di nodi, il che aumenta la convenienza dell'aggiornamento della rete.
Le applicazioni del CAN bus possono soddisfare completamente l'affidabilità e la richiesta in tempo reale della comunicazione dati. Questo è il motivo per cui l'applicazione CAN bus è stata estesa ad applicazioni industriali, mediche e di altro tipo.
Topology figure (Sub-Block):
Storia
BOSCH ha sviluppato il CAN bus nel 1983. CAN è stato annunciato ufficialmente al meeting della International Society of Automotive Engineers (SAE) tenutosi a Detroit, Michigan, Stati Uniti, nel 1986. Il primo controller CAN è stato prodotto da Intel e Philips e rilasciato nel 1987. La prima automobile al mondo dotata di un sistema multilinea basato su CAN è stata la Mercedes-Benz W140, lanciata nel 1991.
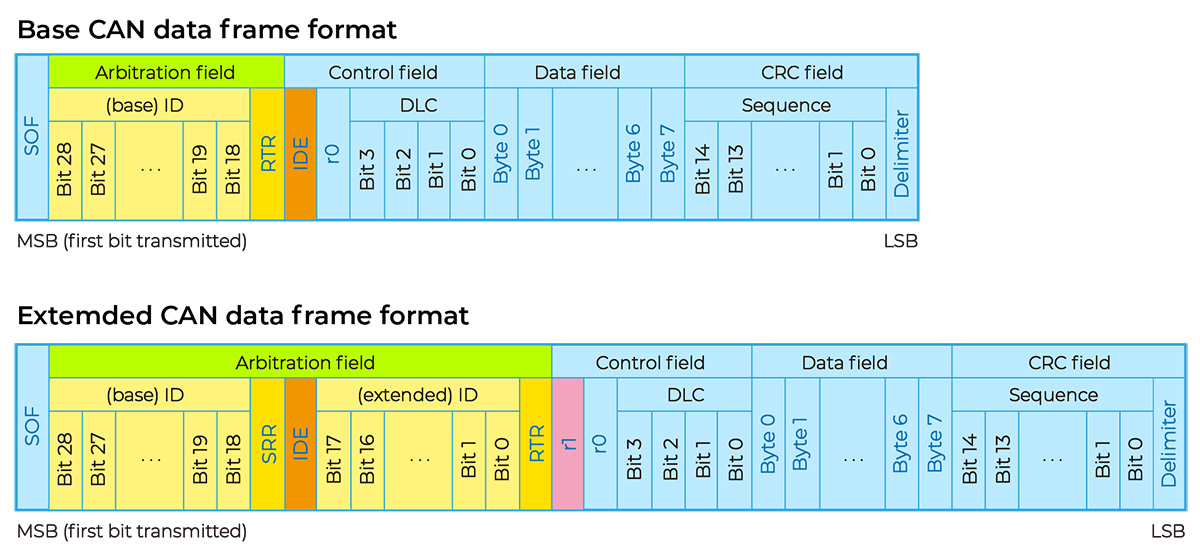
BOSCH ha pubblicato diverse versioni della specifica CAN. CAN 2.0 è stato rilasciato nel 1991. La specifica è divisa in due parti; la Parte A (CAN 2.0A) si applica al formato standard utilizzando codici di identificazione a 11 bit e la Parte B (CAN 2.0B) si applica al formato esteso utilizzando identificatori a 29 bit.
Nel 1993, l'Organizzazione internazionale per la normazione (ISO) ha pubblicato lo standard CAN ISO11898. Successivamente, lo standard CAN è stato ricompilato in due parti: ISO11898-1 copriva il livello di collegamento dati; ISO11898-2 copriva il livello fisico del CAN bus ad alta velocità; ISO11898-3 è stato annunciato in seguito e copriva il livello fisico del CAN bus a bassa velocità e le specifiche di tolleranza agli errori del CAN bus. Gli standard del livello fisico ISO11898-2 e ISO11898-3 non sono inclusi nella specifica BOSCH CAN2.0. Possono essere acquistati separatamente da ISO.
Nel 2012, BOSCH ha annunciato CAN_FD 1.0, o CAN a velocità dati variabile. Questa specifica utilizza un'architettura diversa, consentendo dopo l'arbitrato, il passaggio a un bit rate più veloce e la trasmissione di diverse lunghezze di dati. CAN FD è compatibile con la rete CAN 2.0 esistente, quindi il nuovo dispositivo CAN FD può coesistere con il dispositivo CAN esistente sulla stessa rete di controllo.
Dopo il 1996, tutte le automobili e gli autocarri leggeri venduti negli Stati Uniti dovevano rispettare gli standard OBD-II (On Board Diagnostics). Nell'Unione Europea, i veicoli a benzina venduti dopo il 2001 e i veicoli diesel venduti dopo il 2004 devono rispettare gli standard EOBD (European On Board Diagnostics). Nel 2008 tutti i veicoli venduti negli Stati Uniti devono implementare CAN come uno dei loro protocolli di segnalazione.
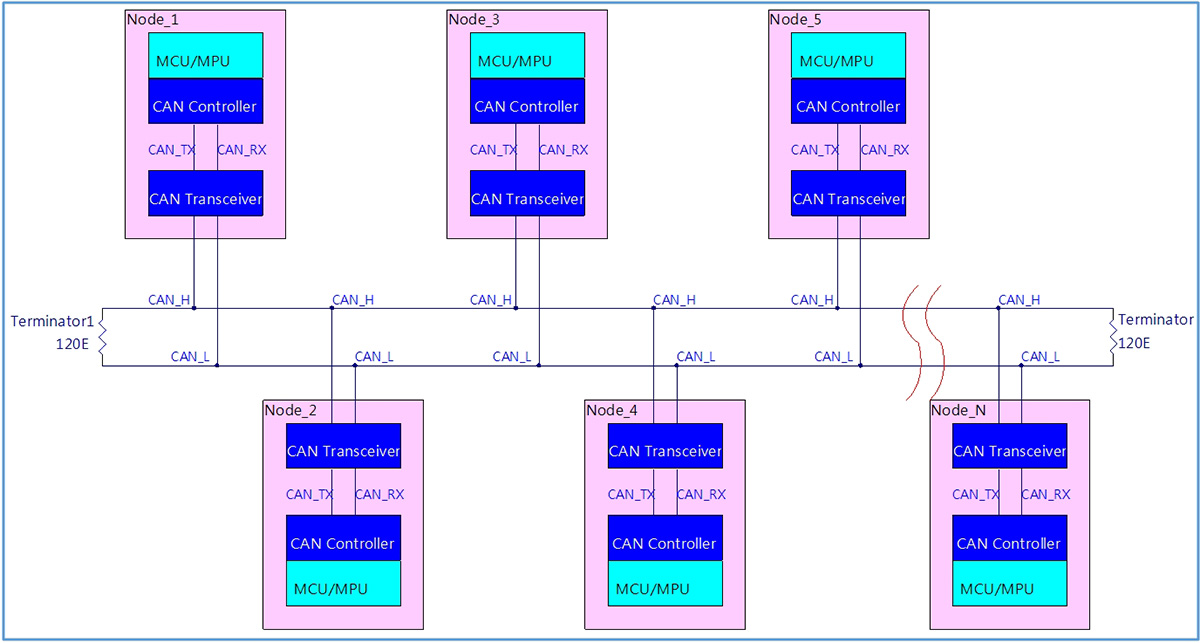
Caratteristiche dell'hardware:
Tutti i nodi sono collegati tra loro da due fili. I due fili formano un doppino intrecciato e sono collegati con un'impedenza caratteristica di 120Ω.
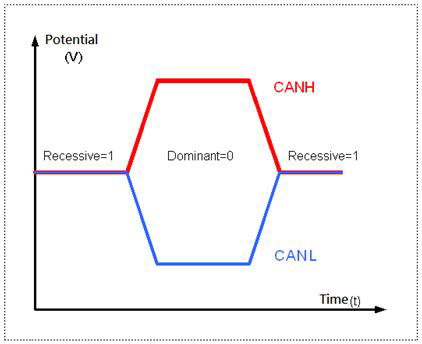
Quando il CAN bus trasmette un segnale dominante (0), alzerà il terminale CAN_H a un livello alto e porterà CAN_L a un livello basso. Quando viene trasmesso il segnale recessivo (1), il terminale CAN_H o CAN_L non verrà azionato. I segnali dominanti CAN_H e CAN_L hanno una tensione differenziale nominale di 2 V.
Aspetto del segnale di livello fisico:
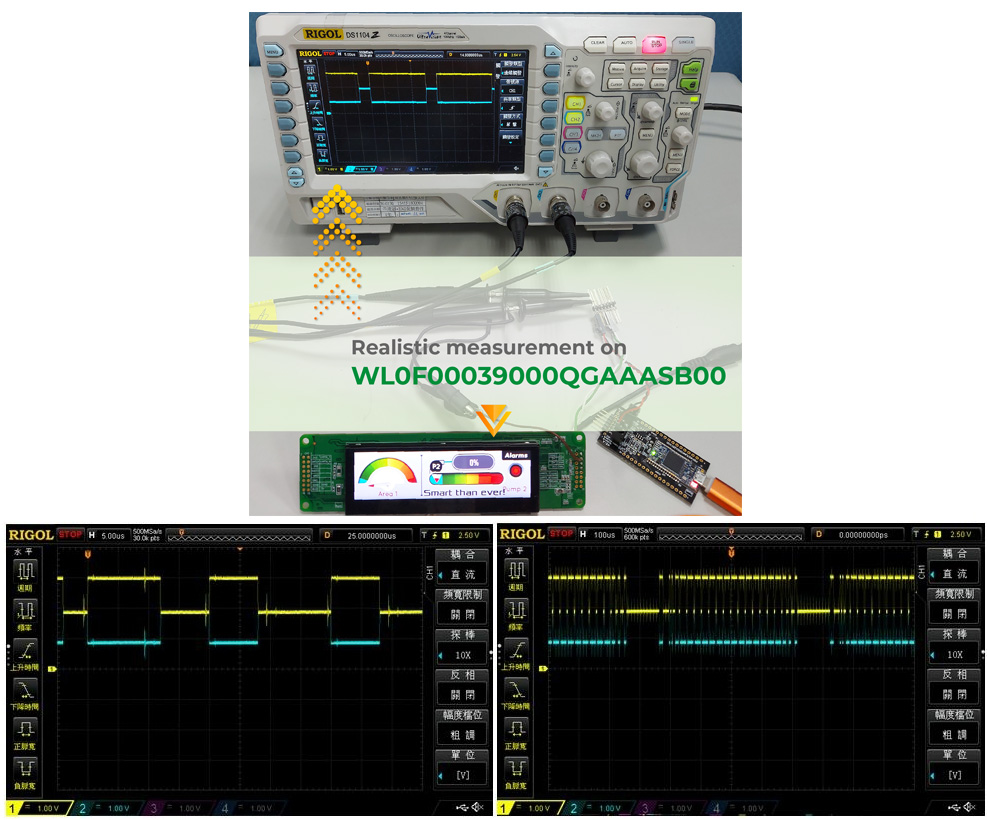
Misura realistica su WL0F00039000QGAAASB00 CAN_H/CAN_L:
Caratteristiche del firmware:
Ogni nodo può inviare e ricevere informazioni, ma non contemporaneamente. Un messaggio o frame include principalmente un codice identificativo (ID), che indica la priorità delle informazioni, fino a otto byte di dati. Anche CRC, ACK e altre parti del frame fanno parte del messaggio.
Se un nodo trasmette un bit dominante (0) e un altro nodo trasmette un bit recessivo (1), allora vi è un conflitto sul bus, e il risultato finale è che il bit dominante "ha la prevalenza". Ciò significa che non vi è alcun ritardo nelle informazioni di priorità più elevata. Le informazioni sul nodo con priorità inferiore vengono trasmesse automaticamente alla fine del bit dominante e la ritrasmissione viene tentata dopo 6 bit di clock. Ciò rende CAN adatto come sistema di comunicazione a priorità istantanea.
La tensione esatta di una logica 0 o 1 dipende dal livello fisico utilizzato, ma il principio di base del CAN richiede che ogni nodo monitori i dati sulla rete CAN, incluso il nodo mittente stesso. Se tutti i nodi trasmettono la logica 1 contemporaneamente, tutti i nodi vedranno questo segnale della logica 1, inclusi il nodo mittente e il nodo ricevente. Se tutti i nodi mittenti trasmettono contemporaneamente un segnale di logica 0, tutti i nodi vedranno questo segnale di logica 0. Quando uno o più nodi mittenti trasmettono un segnale di logica 0, ma uno o più nodi mittenti trasmettono un segnale di logica 1, tutti i nodi, compreso il nodo che trasmette un segnale di logica 1, vedranno anche il segnale di logica 0. Quando un nodo trasmette un segnale di logica 1, ma vede un segnale di logica 0, si renderà conto che è presente una disputa sulla linea e si disconnette. Attraverso questo processo, qualsiasi nodo che trasmette la logica 1 si disconnette o perde l'arbitrato quando altri nodi trasmettono la logica 0. Il nodo che perde l'arbitrato aggiungerà nuovamente le informazioni alla coda in un secondo momento e il flusso di bit del frame CAN continuerà senza errori finché non vi sarà un solo nodo mittente. Ciò significa che il nodo che trasmette la prima logica 1 perde l'arbitrato. Poiché tutti i nodi trasmettono un codice identificativo a 11 bit (o 29 bit in CAN 2.0B) all'avvio di un frame CAN, il nodo mittente con il codice identificativo più basso ha più 0 all'inizio. Quel nodo ha la prevalenza nell'arbitrato e ha la massima priorità.
Formato dati CAN2.0A/B:
I dati sul traffico del CAN bus sembrano:
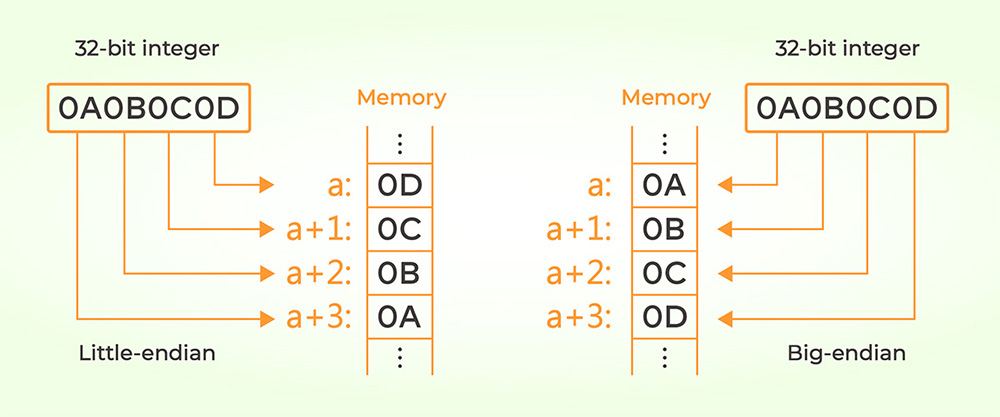
Sequenze di dati nel carico utile:
Conclusioni:
5 vantaggi che abbiamo basato sulle caratteristiche del CAN bus.
- Basso costo: Le ECU (centraline elettroniche) comunicano tramite un'unica interfaccia CAN, il CAN bus offre riduzione dei problemi, leggerezza e basso costo.
- Centralizzato: Il sistema CAN bus consente la diagnosi centralizzata degli errori (es. OBD-II) e configurazione su tutte le centraline.
- Robusto: Il livello fisico del sistema è robusto in caso di guasto dei sottosistemi e dell'EMC (compatibilità elettromagnetica).
- Efficiente: I messaggi CAN hanno la priorità e utilizzano l'arbitrato bit per bit tramite ID in modo che gli ID con priorità più alta non vengano interrotti.
- Versatile: Ogni ECU contiene un chip per ricevere tutti i messaggi trasmessi, decidere la pertinenza e agire di conseguenza. Ciò consente una facile modifica e l'inclusione di nodi aggiuntivi
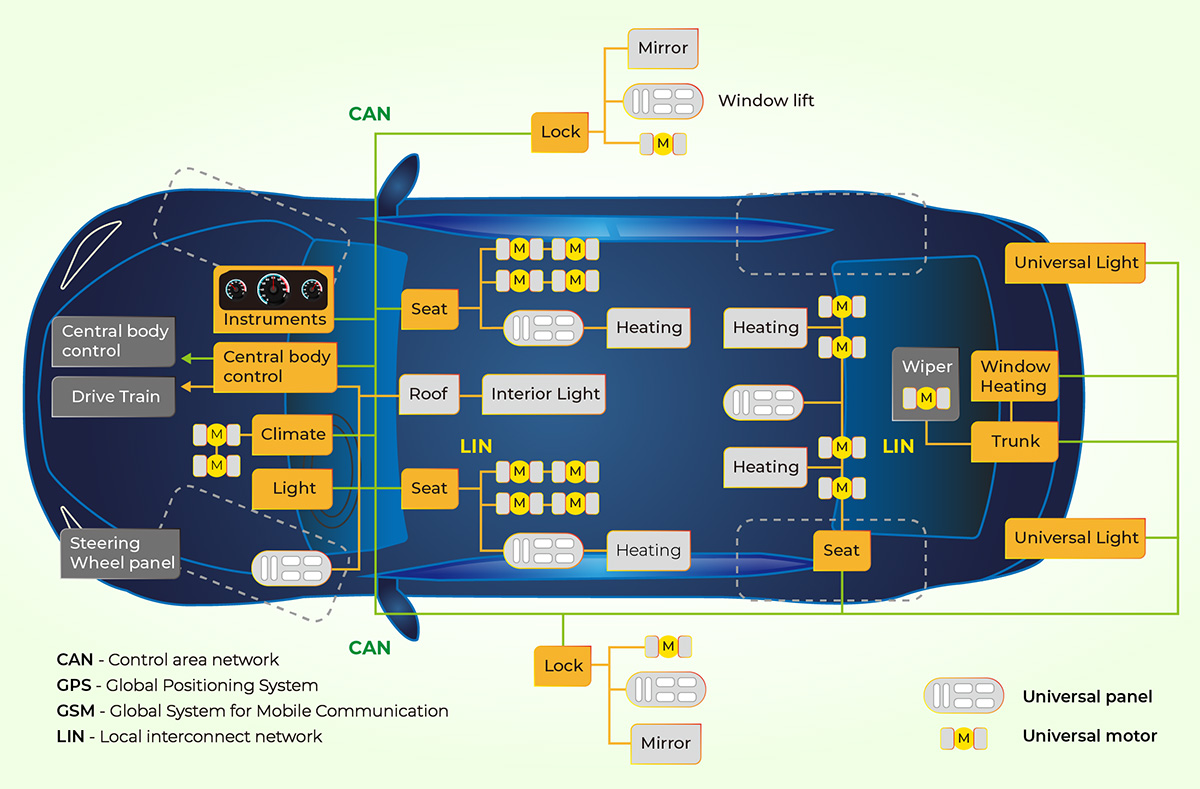
Alcuni esempi di applicazioni:
- Settore automobilistico (strumentazione del veicolo, ABS, OBD-II, ecc.).
- Sistemi di trasporto (veicolo ferroviario, aereo, marittimo, ecc.).
- Macchinari mobili (impilatore/carrello elevatore, edilizia, agricoltura, ecc.).
- Sistemi di controllo delle macchine industriali (automazione industriale, gestione delle informazioni, ecc.).
- Domotica e automazione degli edifici (HVAC, ascensori, ecc.).
- Dispositivi medici e automazione di laboratorio.
Vincoli:
- CANopen, sono presenti ID CAN a 11 bit con codice funzione a 4 bit e ID nodo a 7 bit. Quindi gli indirizzi univoci disponibili per un massimo di 127 nodi su un bus.
- In J1939, sono disponibili indirizzi di dispositivi a 8 bit che equivalgono a un massimo di 255 ID nodo. L'indirizzo 255 viene utilizzato per la trasmissione e il 254 è riservato alla gestione della rete. Quindi gli indirizzi univoci disponibili per 253 nodi su un bus.
- La larghezza di banda di comunicazione è a bassa e alta velocità rispetto alla distanza di trasmissione.