

ウィンスターニュス第152号
- テーマ
- 1) 4インチRGB 480x480 IPS TFT WF40ETWAA6DNN0
- 2) 7インチMIPI1024x600 IPS TFT WF70A8TYAHMNN0
- 3) 10.1インチのMIPI IPS TFT WF101JTYAHMNB0 PCAPタッチスクリーン付き機種
- 4) CANバス
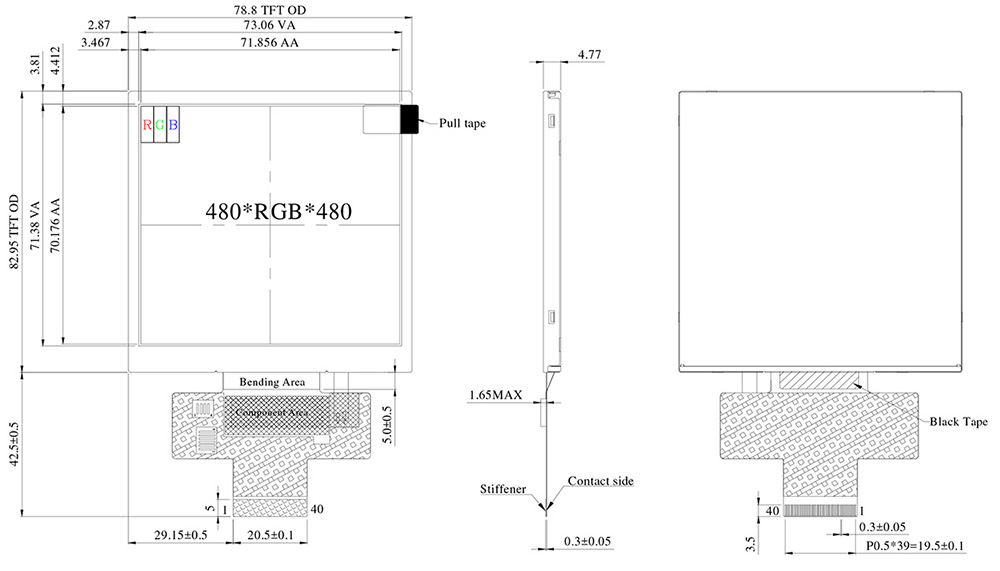
4インチRGB 480x480 IPS TFT WF40ETWAA6DNN0
WF40ETWAA6DNN0は4インチの正方形IPSTFT-LCDモジュールで、 解像度480x480ピクセルで作られて、24ビットRGBインターフェースをサポートして、左:80 /右:80 /上:80 /下:80度 (標準) で、コントラスト比800:1(標準)で、500 nit (標準値)のより広い視野角で、グレア表面パネルで、アスペクト比1:1の利点を備えたIPSパネルを採用しております。お客様が高輝度を必要とする場合は、WF40ESWAA6DNN0 (1000ニット)の選択を検討できます。この機種は投影型静電容量式タッチパネル(PCAP)及び抵抗膜式タッチパネル(RTP)でも使用できます。
WF40ETWAA6DNN0はモジュールに統合されたドライバIC ST7701Sで、インターフェイスの供給電圧範囲は2.5V~3.6Vで、標準値は2.8Vです。操作温度範囲が30℃から+ 80℃までで、保存温度範囲が-30℃から+80℃までです。
|
 |
► Link to WF40ETWAA6DNN0 web page

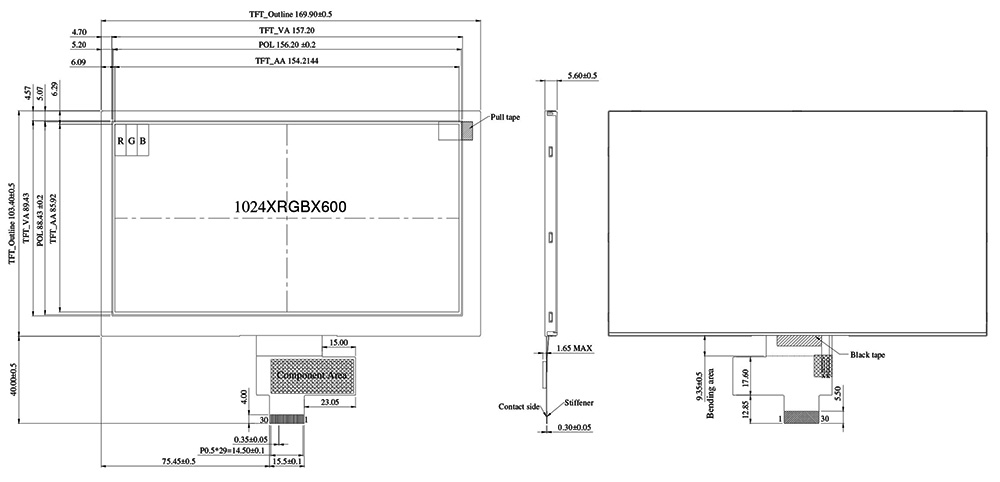
7インチMIPI1024x600 IPS TFT WF70A8TYAHMNN0
WF70A8TYAHMNN0は7インチのMIPI DSIインターフェイス1024x 600 IPS TFT-LCDモジュールです。 このTFT-LCDは、左:85 /右:85 /上:85 /下:85度にして、コントラスト比800:1 (標準値)で、アンチグレア表面パネルで、アスペクト比16:9で、明るさ600ニット(標準値) の広い視野角という利点を備えたIPSテクノロジーを備えております。お客様が高輝度を必要とする場合は、WF70A8SYAHMNN0 (1100ニット) の選択を検討できます。この機種は、投影型静電容量式タッチパネル(PCAP)及び抵抗膜式タッチパネル(RTP)オプションで利用できますし、LVDSインターフェースのオプションでも利用できます。
WF70A8TYAHMNN0 TFTモジュールは、EK7900AD3及びEK73217BCGAドライバーICを内蔵して、4レーンMIPIインターフェース(モバイルインダストリープロセッサーインターフェース)及びDSI(ディスプレイシリアルインターフェース)をサポートします。高速データ伝送と高速クロック伝送の特性によって、MIPI DSIインターフェースはますます普及しております。WF70A8TYAHMNN0はアスペクト比16:9で、アンチグレア表面パネルを備えて、操作温度範囲が-20℃から+70℃までで、保存温度範囲が30℃から+80℃までです。
|
 |
► Link to WF70A8TYAHMNN0 web page
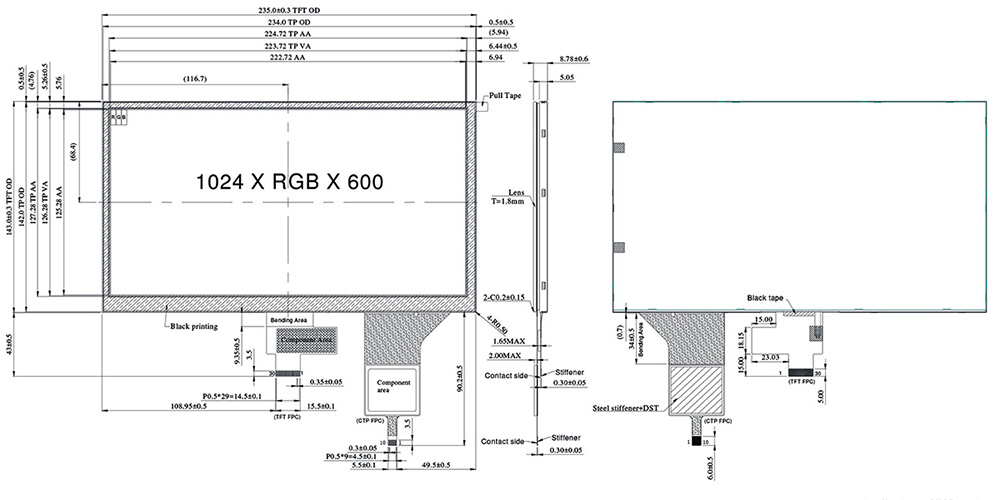
10.1インチのMIPI IPS TFT WF101JTYAHMNB0 PCAPタッチスクリーン付き機種
WF101JTYAHMNB0は10.1インチのMIPI DSIインターフェイス1024x600 IPS TFT-LCDモジュールで、静電容量式タッチパネル(PCAP)が投影されております。このTFTモジュールは、左:85 /右:85 /上:85 /下:85度にして、明るさ400ニット(標準値)の広い視野角の利点を持っているIPS技術を備えております。お客様が高輝度を必要とする場合は、WF101JSYAHMNB0を選択できます。WF101JTYAHMNT0及びWF101JSYAHMNT0 (高輝度)の抵抗膜方式タッチスクリーンオプションでも利用できます。
WF101JTYAHMNB0モジュールに、EK79007AD3及びEK73217BCGAドライバーICが組み込まれて、4レーンMIPI DSIインターフェースをサポートします。静電容量式タッチパネルは、USB及びI2CインターフェースをサポートするILI2511ICを内蔵しております。MIPI DSIインターフェースは、高速データ伝送と高速クロック伝送の特性により、より一般的になります。このTFTモジュールはアスペクト比16:9で、グレア表面パネルを備えて、操作温度範囲が-20℃から+70℃までで、保存温度範囲が-30℃から+80℃までです。
|
 |
► Link to WF101JTYAHMNB0 web page
CANバス
序文:
Winstar社は引き続き包括的なソリューションサービスをお客様に提供して、それに応じてスマートディスプレイシリーズ製品を積極的に発売しました。 出発点としてCANシリーズのスマートディスプレイを発売し始めます。CANインターフェイスとは何でしょうか。 どのように機能するでしょうか。ユーザーにどのような利点をもたらすことができるでしょうか。以下の詳細内容を読んでみましょう。
序章
CAN(Controller Area Network)は機能が豊富な自動車用バス規格です。RS485インターフェイスとは異なって、ネットワーク上のECU(電子制御ユニット)がホストを必要とせずに相互に通信できるように設計されて、基本的にコントロールエンドとしてホスト(マスター)が必要にします。但しCANはホスト制御なくでも、より優れた柔軟な通信アプリケーションを提供します。
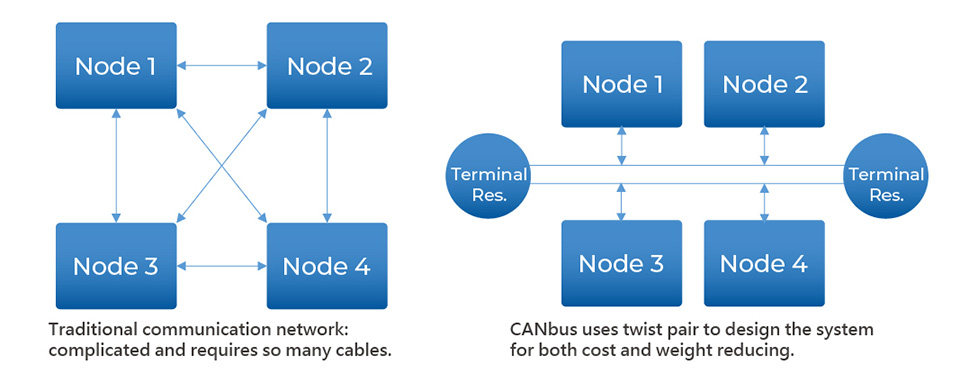
RS485システムトポロジー
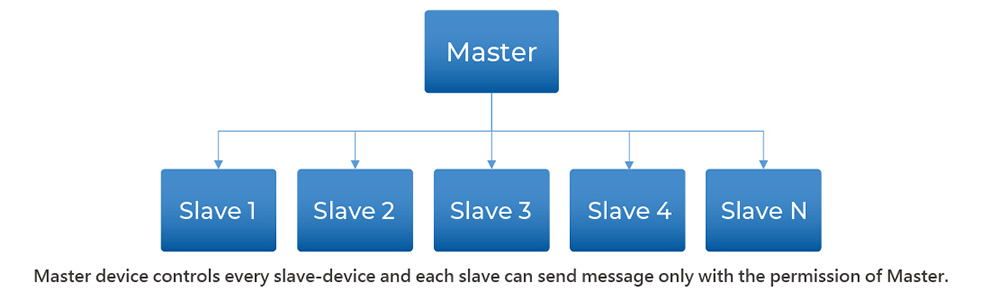
CAN Bus システムトポロジー
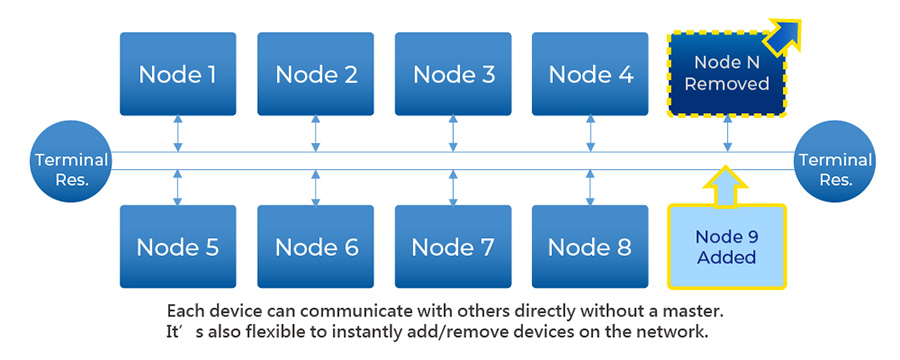
CANはメッセージ指向プロトコルに基づく放送通信メカニズムです。 情報に応じて、特定のステーションアドレス(ノードID)を割り当てるのではなく、メッセージ識別子(各識別子はネットワーク全体で一意)を使用して、配信するメッセージの優先順位を定義します。したがって、CANに優れた柔軟な調整機能があって、ソフトウェアやハードウェアを調整せずに既存のネットワークにノードを追加できます。 さらに、メッセージの送信は特別なタイプのノードに基づいていなくて、ネットワークをアップグレードする際の利便性が向上します。
CANバスのアプリケーションは、データ通信の信頼性とリアルタイムの要求を完全に満たすことができます。 これがCANバスアプリケーションが産業医療やその他のアプリケーションに費やされた理由です。
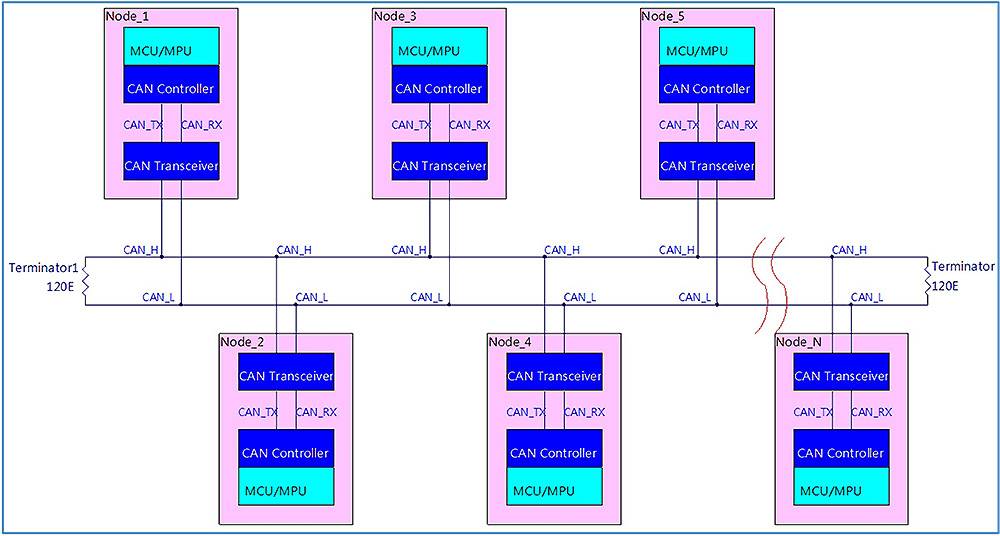
トポロジー図(Sub-Block):
歴史
BOSCH社は1983年にCANバスを開発して、1986年に米国ミシガン州デトロイトで開催されたInternational Society of Automotive Engineers(SAE)の会議で正式に発表されました。最初のCANコントローラーはIntelとPhilipsによって製造されて1987年にリリースされました。CANベースのマルチラインシステムを搭載した世界初の車両は、1991年に発売されたメルセデスベンツW140でした。
BOSCH社はCAN仕様のいくつかのバージョンを公開しています。CAN2.0は1991年にリリースされて二つの仕様はあります。パートA(CAN 2.0A)は11ビットの識別コードを使用する標準フォーマットに適用されるもので、パートB(CAN 2.0B)は29ビットの識別子を使用する拡張フォーマットに適用されるものです。
また、1993年に国際標準化機構(ISO)はCAN標準ISO11898を公開しました。その後CAN標準は2つの部分に再コンパイルされました。ISO11898-1はデータリンク層をカバーして、ISO11898-2は高速CANバスの物理層をカバーしています。ISO11898-3は後で発表されて低速CANバスの物理層とCANバスのフォールトトレランス仕様をカバーしています。物理層標準ISO11898-2及びISO11898-3はBOSCH CAN2.0仕様に含まれません。これらはISOとは別に購入できます。
2012年にBOSCH社はCAN_FD 1.0、つまり可変データレートCANを発表しました。この仕様は異なるアーキテクチャを使用して、アービトレーション後、より高速なビットレートに切り替えて、異なるデータ長を送信できます。CAN FDは既存のCAN2.0ネットワークと互換性があるため、新しいCANFDデバイスは同じ制御ネットワーク上の既存のCANデバイスと共存できます。
1996年以降、米国で販売されるすべての自動車と小型トラックはOBD-II標準(オンボード診断)に準拠する必要がありました。欧州連合では、2001年以降に販売されたガソリン車と2004年以降に販売されたディーゼル車は、EOBD基準(European On Board Diagnostics)に準拠することが義務付けられています。2008年に米国で販売されるすべての車両は信号プロトコルの1つとしてCANを実装する必要があります。
ハードウェア機能:
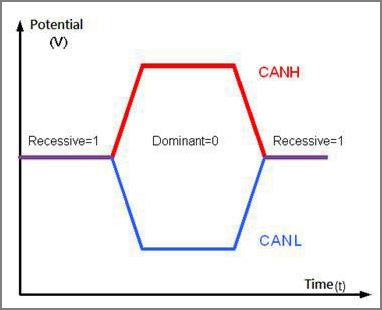
すべてのノードは2本のワイヤーで接続されています。 2本のワイヤはツイストペアを形成して、120Ωの特性インピーダンスで接続されます。CANバスがドミナント(0)信号を送信すると、CAN_H端子がハイレベルに持ち上げられて、CAN_Lがローレベルに引き下げられます。リセッシブ(1)信号が送信されると、CAN_HまたはCAN_L端子は駆動されません。 主信号CAN_H及びCAN_Lの公称差動電圧は2Vです。
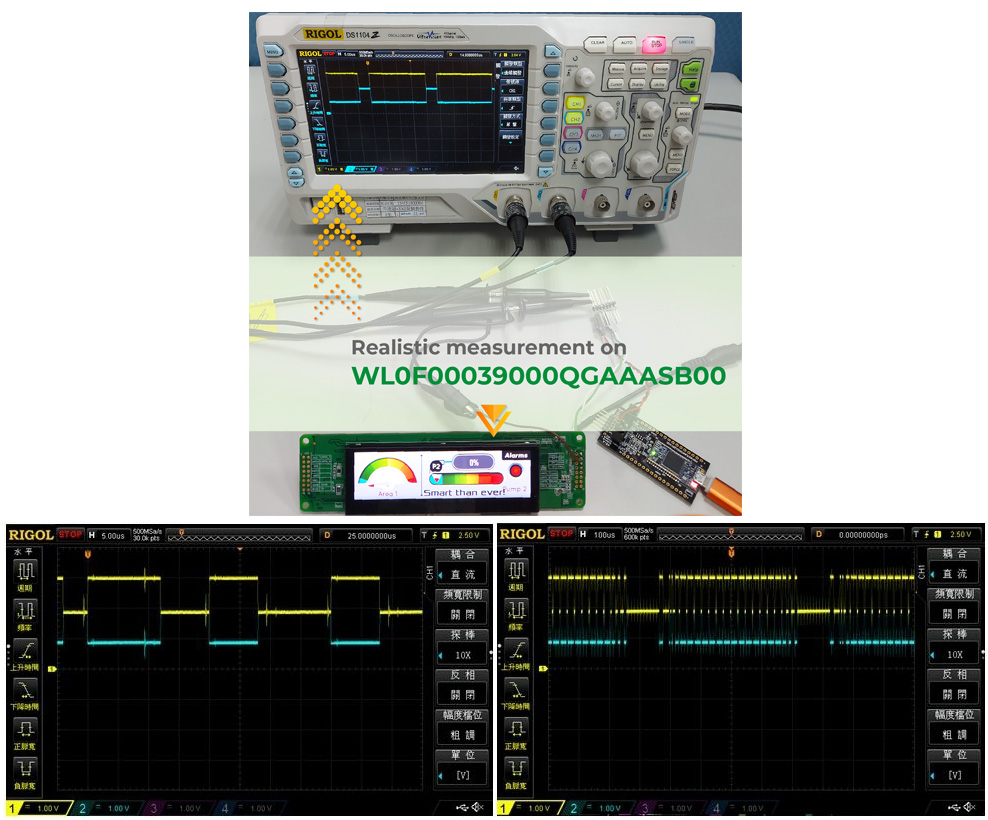
物理層の信号の外観:
WL0F00039000QGAAASB00 CAN_H / CAN_Lでの現実的な測定:
ファームウェアの機能:
各ノードは情報を送受信できますが、同時に受信することはできません。メッセージまたはフレームには、主に情報の優先度を示す識別コード(ID)が最大8データバイト含まれます。 CRC、ACK及びその他のフレーム部分もメッセージの一部です。
1つのノードがドミナント(0)ビットを送信して、別のノードがリセッシブ(1)ビットを送信する場合、バス上で競合が発生して、最終的な結果としてドミナントビットが「勝ち」ます。これは優先度の高い情報に遅延がないことを意味します。優先度の低いノード情報はドミナントビットの最後で自動的に送信されて、6クロックビット後に再送信が試行されます。これにより、CANはインスタント優先通信システムとして適しています。
ロジック0または1の正確な電圧は、使用する物理層によって異なりますが、CANの基本原理では、送信ノード自体を含めて、各ノードがCANネットワーク上のデータを監視する必要です。 すべてのノードが同時にロジック1を送信している場合、送信ノードと受信ノードを含むすべてのノードにこのロジック1信号が表示されます。すべての送信ノードが同時にロジック0信号を送信する場合、すべてのノードにこのロジック0信号が表示されます。1つ以上の送信ノードが論理0信号を送信するが、1つ以上の送信ノードが論理1信号を送信する場合、論理1信号を送信するノードを含むすべてのノードも論理0信号を認識します。ノードがロジック1信号を送信したが、ロジック0信号を確認すると、回線に紛争があることに気づいて、ログアウトします。このプロセスを通じて、ロジック1を送信するノードは他のノードがロジック0を送信すると、ログアウトするか、アービトレーションを失います。 アービトレーションを失ったノードは、後で情報をキューに再追加して、CANフレームのビットストリームは送信ノードが1つだけになるまで失敗することなく続行されて、これは最初のロジック1を送信するノードがアービトレーションを失うことを意味します。CANフレームの開始時にすべてのノードが11ビット(またはCAN 2.0Bでは29ビット)の識別コードを送信するため、識別コードが最も小さい送信ノードの先頭には0が多くなります。そのノードがアービトレーションに勝ち、最高の優先順位を持ちます。
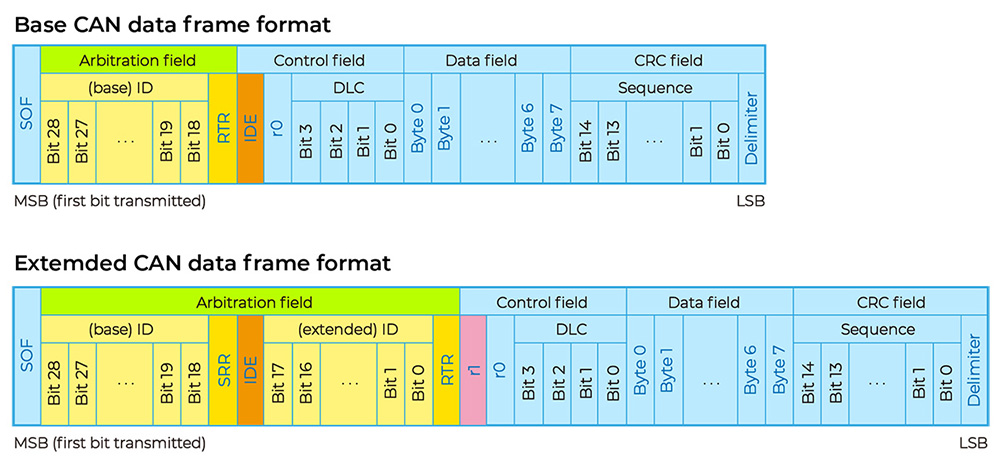
CAN2.0A / Bデータ形式:
CANバストラフィックデータは次のようになります:

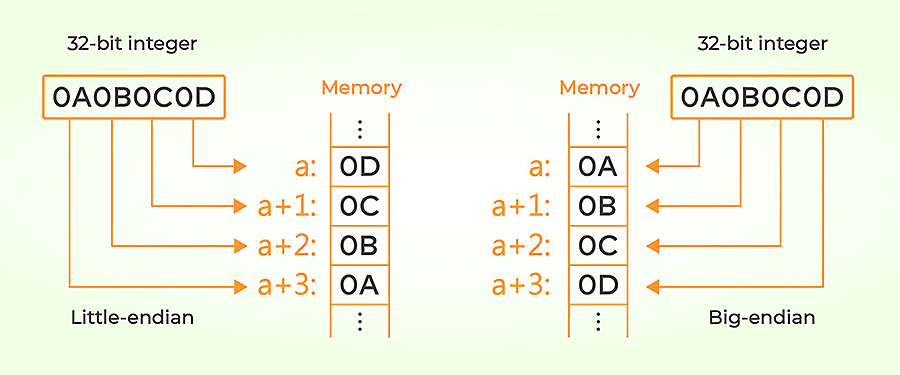
ペイロード内のデータ配列:
結論:
5 CANバス機能に基づいて得られるメリットは次の通りです。
►低コスト: ECU(Electronic Control Units:電子制御ユニット)は単一のCANインターフェースを介して通信してCANバスは問題の軽減、軽量、低コストを提供します。
►集中型: CANバスシステムは、すべてのECUにわたる中央エラー診断(例:OBD-II)と構成を可能にします。
►堅牢: システムの物理層は、サブシステムとEMC (Electromagnetic Compatibility:電磁両立性)の障害に対して堅牢です。
►効率的: CANメッセージには優先順位が付けられて、IDを介したビット単位のアービトレーションが利用されるため、最も優先度の高いIDが中断されることはありません。
►フレキシブル: 各ECUに送信されたすべてのメッセージを受信して、関連性を判断して、それに応じて動作するためのチップが含まれています。これにより、追加のノードを簡単に変更および含めることができます。
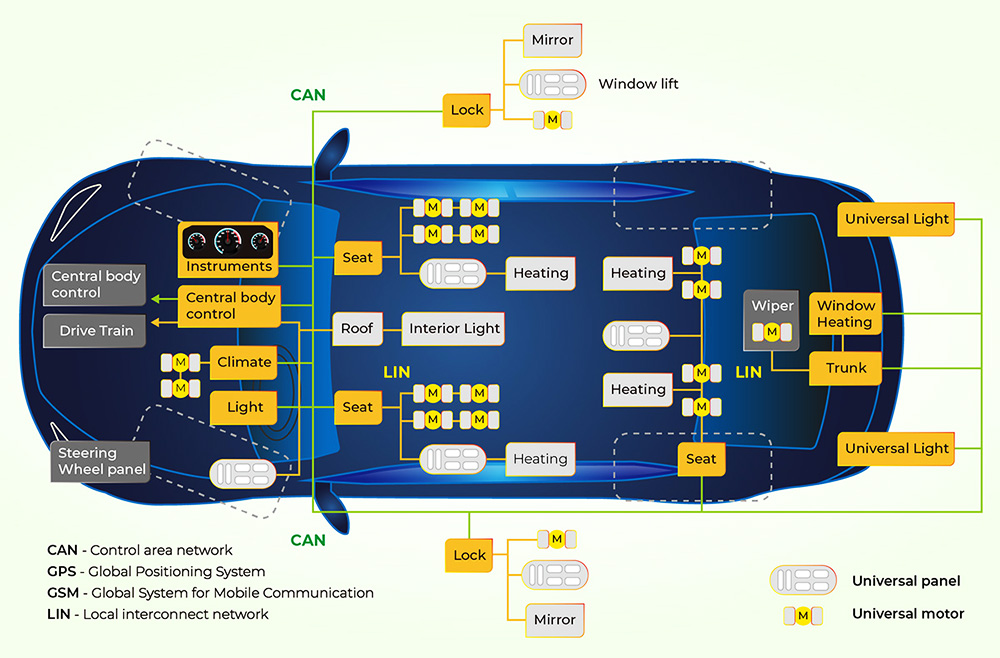
アプリケーションの例:
- 自動車(車両用計器、ABS、OBD-II等)。
- 輸送システム(鉄道車両、航空機、船舶等)。
- モバイル機械(スタッカー/フォークリフト、建設、農業等)。
- 産業機械制御システム(産業オートメーション、情報管理等)。
- 住宅及びビルの自動化(HVAC、エレベーター等)。
- 医療機器とラボラトリーオートメーション。
制約:
►CAN openに4ビットの機能コードと7ビットのノードIDを備えた11ビットのCAN IDが有りますので、バス上の最大127ノードで使用可能な一意のアドレスです。
►J1939に最大で255ノードIDに等しい8ビットのデバイスアドレスが有ります。アドレス255はブロードキャストに使用されて、254はネットワーク管理用に予約されておりますので、バス上の253ノードで使用可能な一意のアドレスです。
►通信帯域幅が狭く、速度が速いため、伝送距離が長くなりません。

追記: この技術文書の原文は英語で、和訳の内容に疑問がある場合は、原文をご参考願
► Link to CAN Bus Introduction web page